
こちらは2020年9月にリリースされた、DobotStudio2020の紹介記事です。本稿では新機能となるポイントリスト(Points List)の概要をご紹介いたします。
興味がございましたら、ぜひダウンロードセンター
https://www.dobot.cc/downloadcenter/dobotstudio2020.html#most-download
より入手した上でご体験ください。
どういった機能か
ポイントリストでは、DobotM1のアーム位置を記録・保持することができます。(プログラミングでいう変数にあたる機能です)
動作中のある位置を記録して何度も利用したい場合に、その座標をポイントリストに追加することで、以後は具体的な座標の指定なしに「点の名前」を伝えて動かすことができます。
こちらの機能はTeach & PlaybackとBlocklyでは共通して扱えるほか、Pythonによるスクリプト機能においても利用することができます。
活用例
使い方の説明をする前に、「なにができるかは分かったけど、結局どう便利になったの?」という部分について、動作例を交えてお話しします。「まずは使うための操作方法を知りたい!」という方は、次の見出し(どのように使うか)を先にご覧ください。
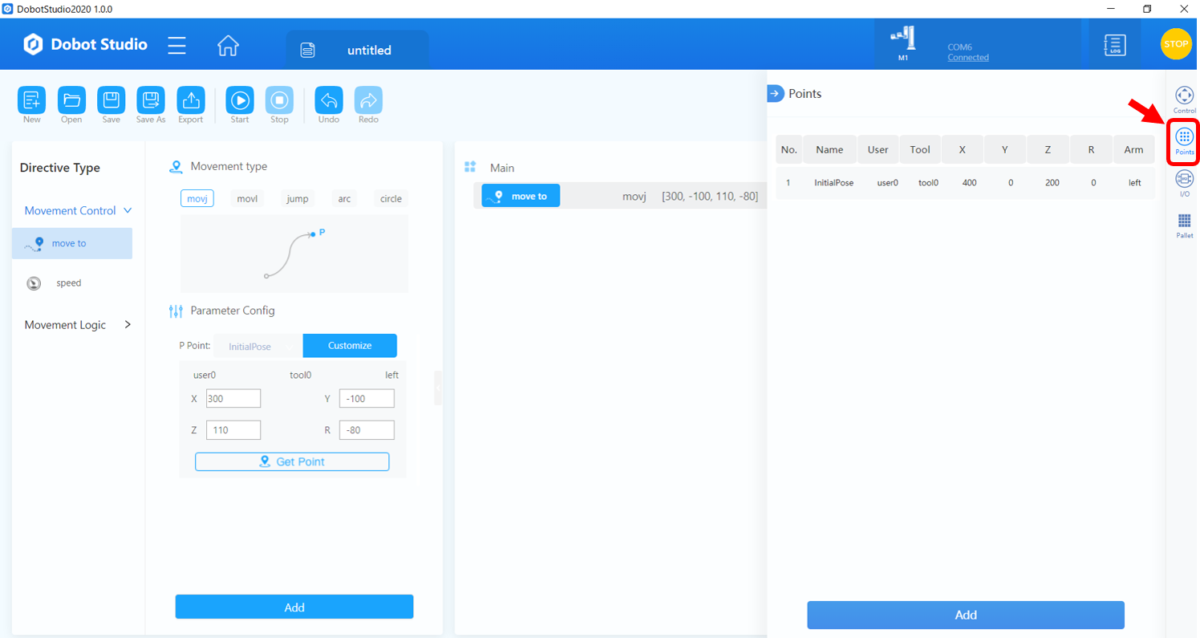
では、以下の図を使って説明しましょう。

ここでは初期位置 “InitialPose” に加え、 “P1″、 “P2” という合計3つの点をポイントリストに記録しています。そしてMain部分では、初期位置を中心としてジグザグに5回、反復横跳びのような動作をするよう指示しています。
ここで用いる点の座標を自分で手入力するケースを考えてみましょう。(図ではTeaching & Playbackの例になっていますが、BlocklyやPythonスクリプトのパラメータ設定においても同様です)
移動する量や頻度が増えるほど入力ミスのリスクが高まる上、なにより面倒です。とりわけハンドティーチによりアームを動かして設定する場合などは、そもそも「同じ座標」に持ってくることすら困難になります。
ポイントリストにより一度経由した座標を再利用することで、これまで難しかった「正確に同じ点に動く」指示が容易になるのです。
どのように使うか
ここでは任意の点をポイントリストに追加する手順について説明いたします。例として適当な位置にアームを動かし、この後の動作でこの位置を基準にした動きをさせたい場合を考えます。
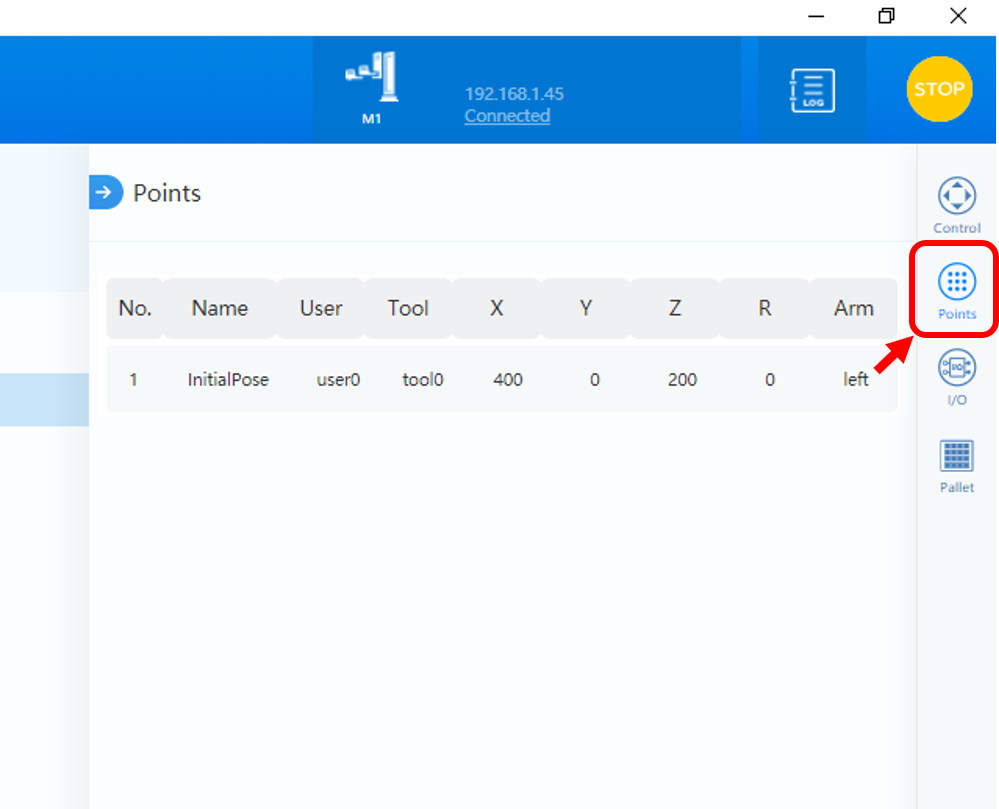
まずは画面右側のPointsメニューをクリックしましょう。現在のリストの中身が表示されます。デフォルトでは設定されている初期位置が “InitialPose” という名前で記録されています。
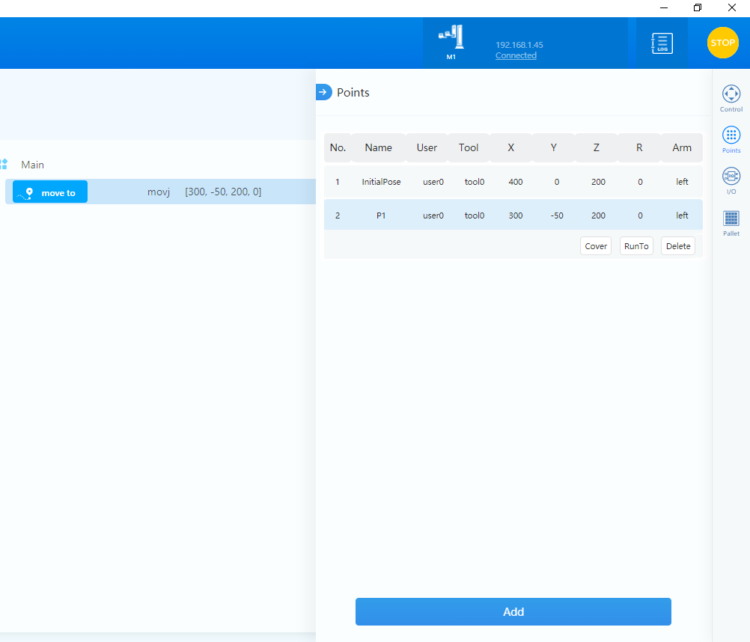
下図の赤枠で囲まれている位置までアームを動かした後、リスト下部のAdd(下図の赤矢印)をクリックします。これにより、現在のアーム位置がポイントリストへ追加されます。追加された点は下図の例では “P1” という名前になっています。

もしその後の操作で今回と同じ位置を指定したい場合は、Parameter Config中の “InitialPose” 右にある下矢印をクリックして設定します。ドロップダウンリストの中から、先ほど追加した点 “P1” を選択します。

この状態で “Add” をクリックすれば “movj P1” という指示になり、各パラメータで座標を指定した時と同様のはたらきをします。

同様にして複数の点をリストに追加して使うことができれば、動作例のような複雑な動作の指示も正確に行えます。ちなみにポイントリストに追加した点の名前などを変更したい場合は、Pointsメニューで表示されるリストから編集できます。
この機能は画像例で示したハンドティーチングのほか、BlocklyやPythonによるプログラミングにおいても利用できます。目的に応じてわかりやすい名前を付けておくと、プログラムを見た時にどういう動作がなされるか判断しやすくなりますね。
ポイントリスト機能の紹介は以上です。公式ページによると、DobotStudio2020ではこのほかの新機能として
- 入出力エイリアス(I/O alias)
- ユーザー座標系(User coordinate system)、
ツール座標系(Tool coordinate system) - パレット(pallet)
を挙げています。各機能に分けて紹介記事を作成しておりますので、あわせてご覧ください。