Dobot Magicianは、力が加わることによってアームに歪みが生じ、測位精度が低下してしまう場合があります。この場合、キャリブレーションを行うことによって、アームのずれを校正することができます。
本稿では、Dobot Magicianのキャリブレーションが必要な状態やその方法について記載しています。
Dobot Magicianは、力が加わることによってアームに歪みが生じ、測位精度が低下してしまう場合があります。この場合、キャリブレーションを行うことによって、アームのずれを校正することができます。
本稿では、Dobot Magicianのキャリブレーションが必要な状態やその方法について記載しています。
本項目では、DobotStudioのBlocklyから自動生成したPythonコードをRaspberry Piで実行するための手順を記載しています。
“DobotStudioのBlocklyから自動生成したPythonコードをRaspberry Piで実行する方法” の続きを読む
DOBOT Magician エアーポンプ部分の規格を計測結果をもとにまとめました。
お問い合わせ内容
Dobot Magician で dobot を p1(x:180,y:0)からp2(x:180,y:10)へ移動させたとき
p1~p2間の距離が≒13mmになっています
Dobot Magician で dobot を p1(x:180,y:0)からp2(x:180,y:10)へ移動させたとき
p1~p2間の距離が≒13mmになっています
DOBOT Robot Vision Kit内で標準で用意されているサンプルscript functionを元に、Shell Moduleの使用方法を記載します。
Dobot MagicianのEIOに関するドキュメント”Dobot Magician Interface description v2″(ダウンロードサイト)には入力モードの等価回路は乗っているのですが,出力モード時の等価回路が乗っていません。
そこで今回Dobot Magician のEIO14の出力モードの時の内部回路の等価回路を実験により求めました。
Robot Vision KitはDOBOT MagicianやDOBOT M1でビジョンシステムを素早く作成することができます。今回はその中でもよく使われる円検出について解説します。
Dobot MagicianのI/Oインターフェースを利用して、2つのエアーポンプを同時に動作させる方法の解説を行います。より広範な作業への適用をお考えの方にとって、ご参考になれば幸いです。
Dobot Magicianに関するFAQです。
お問い合わせ内容:
SetPTPCmd等で指定した同じ位置に対して、時折アームが少しずれた位置(~10mm)に移動することがある。
アーム動作にずれが生じる場合には、原因となるいくつかの可能性が考えられます。お困りの方は以下の点を参考に、いま一度お手元にてご確認いただけますと幸いです。
Dobotで軌道に沿う動作を行う場合、軌道に沿うような複数の座標点を与えます。その際SetPTPCmdを使用すると、1つ1つの点で停止してしまい、滑らかな動作をしません。ここでSetCPCmdを使用します。このコマンドは、3Dプリントやレーザー彫刻の際に使われているコマンドで、複数の座標点を与えたときに連続的な動作を行うことができます。今回は円軌道に沿う動作を行うプログラム例に、軌道に沿う動作を行う方法を解説します。Dobot StudioのScripts環境で行った場合とC++11環境で行った場合の2種類の例を示します。
Dobot Magicianに保存されたプログラムをスタンドアロンで動作させるには背面にあるKEYボタンを押すことで起動することができました。しかしプログラムの停止や初期化などの機能がなかったので使用する際に不便でした。そこで新たに追加されたAdvanced I/O Functionを使用します。この機能を使用するとDobot Magicianに接続した外部スイッチからプログラムを再開や停止などを行うことや外付けしたLEDによるエラーの検出などを行うことができます。
Dobot Studioは英語、中国語、日本語など複数の言語に対応しています。今回はその設定方法を説明します。
1.Dobot Studioの右上にあるEN,ZS,JAなどの文字をクリックし、表示されるリストから選択する

2.Dobot Studioを再起動すると設定が反映される
なお、Dobot Studioのバージョンが古い場合、言語の切り替えに日本語が入っていない場合があります。また、誤ってWindows XP用のDobot Studio XPをインストールすると、同様に日本語に切り替えができません。これらの場合、ダウンロードページにて最新版を取得しインストールしてください。
DOBOT Magicianには、操作の後に自動的にアームが向かう移動先が、2箇所あります。
1つは、DOBOT Magicianの電源ボタンを操作して本体の電源を落したときに、電源が切れる前に自動的にアームが向かう「格納位置」で、もう1つは、homingと呼ぶキャリブレーション動作を行った後に、自動的にアームが向かう「ホームポジション」です。
「格納位置」は変更できませんが、「ホームポジション」は設定により変更できます。
本稿では、(1)ホームポジションの変更が有効な場面を説明後、(2)具体的な変更方法と、(3)変更したホームポジションをデフォルトの設定に戻す方法について、説明します。
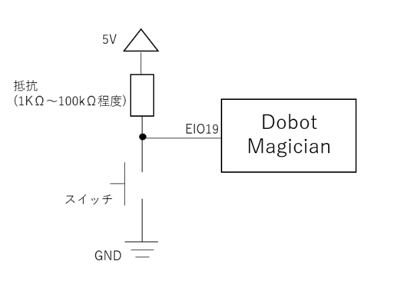
DOBOT Magicianは、アーム上や台座背面に拡張コネクタが用意されており、外部とのI/Oとして使用できます。ここにセンサーやスイッチ、LEDなどの部品をつなぐことで、より応用が広がります。本稿では、接続可能なコネクタ部品の型番や入手方法をご紹介します。
なお、I/Oを利用する簡単な例として、外部にスイッチを接続し、DOBOT Magicianを外部からのトリガーで動かす例を下記にまとめておりますので、あわせて参照ください。
DobotMagicianの速度は
となります。
速度を変えたい場合は速度比、設定速度の二つを変更する必要があります。
今回はDobotStudioから使用可能な
について速度比と設定速度の変更方法を記載します。 “DobotMagicianの速度パラメータに関して” の続きを読む
Dobot Magicianは、ハンドティーチングやBlocklyを使って、アームの動きを手軽にプログラミングすることができます。例えば、工場のラインに並ぶFA機器の1つとしてDobot magicianを置くことで、ワークの移動や整列など決められた作業を正確に繰り返してくれます。
さらに、Dobot MagicianにはEIOと呼ぶ拡張I/O端子があり、これら入出力をロボットアームの動作と組み合わせることで、外部からのトリガを受けてアームを動かしたり、動作が完了したら外部にトリガを出す、といったことが可能となります。
以降では、スイッチを使って、ラインを流れてくるワークが所定の位置に来たことを検出したらロボットアームを動かす場合を想定して、実現のポイントをまとめます。
小型ロボットアームDOBOT Magicianは、USB接続によりPCからもSBCからもコントロールできます。ロボットアームを制御するためのAPIは、共有ライブラリ(DLLもしくはshared object)として用意されているため、プログラミング言語はC++でもPythonでも選択でき、利用の幅が広がります。
ただし、DOBOT社から提供されている共有ライブラリは、Intel系のCPUのもののみです。SBCに多いARM系のCPUでDOBOT Magicianを制御するためには、ソースコードからコンパイルする必要があります。
ここでは、Jetson Nanoを例にとり、DOBOT MagicianをPythonから制御するための環境の整備方法をまとめます。
なお、以降の説明では、執筆時点で最新であるr32.3.1版のOSを前提としています。
ロボットアームDOBOT Magician V2は、2018年11月より販売開始された新しい機種で、従来のV1(旧製品)と異なる点があります。
V1向けの周辺オプションの中には、V2に対応していないものがありますのでご注意ください。
主な違いについて、以下にまとめます。
DobotStudioのHomeボタンをクリックして、ホームポジションに戻してから、再度実行してみて下さい。Home後に、Beep音がなり、LEDが緑に点灯していることを確認して下さい。
クラッシュ直後のダイアログウィンドウの詳細ボタンをクリックして下さい。メッセージに中にig4icd23.dllに関する記述がある場合、このdllファイルが壊れている可能性があります。
以下の手順をお試し下さい。以下のサイトなどから、ig4icd32.dllをダウンロードします。 “DobotStudioが起動後すぐにクラッシュする。” の続きを読む
いくつかの原因が考えられます。 “DobotMagicianのR(J4)が回転しない。” の続きを読む

![[Dobot Magician] 2つのエアーポンプを同時に操作する方法](https://physical-computing-lab.net/wp-content/uploads/dobot.jpg)