
投稿者: M.
Unitree A1用 高トルクインテリジェントモーターのご購入者様へ
Dobot MagicianのC言語サンプルプログラム
Dobot MagicianのPythonサンプル
AlienGoの説明書のダウンロードについて
Unitree A1のLidarの接続方法

Unitree A1にはExplorerバージョンがあり、Lidarが搭載されています。通常版のUnitree A1にも、Lidarをオプションで用意しています。
いずれの場合も、LidarをA1に接続するケーブルは、破損を防ぐため外した状態で、専用ケースに格納されています。
Lidarを使用するにあたって、ケーブルを接続すべき場所および補足情報をまとめます。
Windows10インストール済みのSeeed Odysseyを日本語化する手順

Seeed StudioのOdysseyは、Intel Celeron J4105搭載のmini PC です。
Activate済みのWindows10 Enterpriseがインストールされたモデルは、購入後すぐに使用できる手軽さがありますが、デフォルトの表示言語は英語です。
Windows10を扱い慣れている方でも、英語版OSを日本語化する機会はそうそうないので戸惑うはず。そこで、手順をまとめてみました。
Unitree A1の説明書のダウンロードについて
Tinker Edge RのOSインストール手順
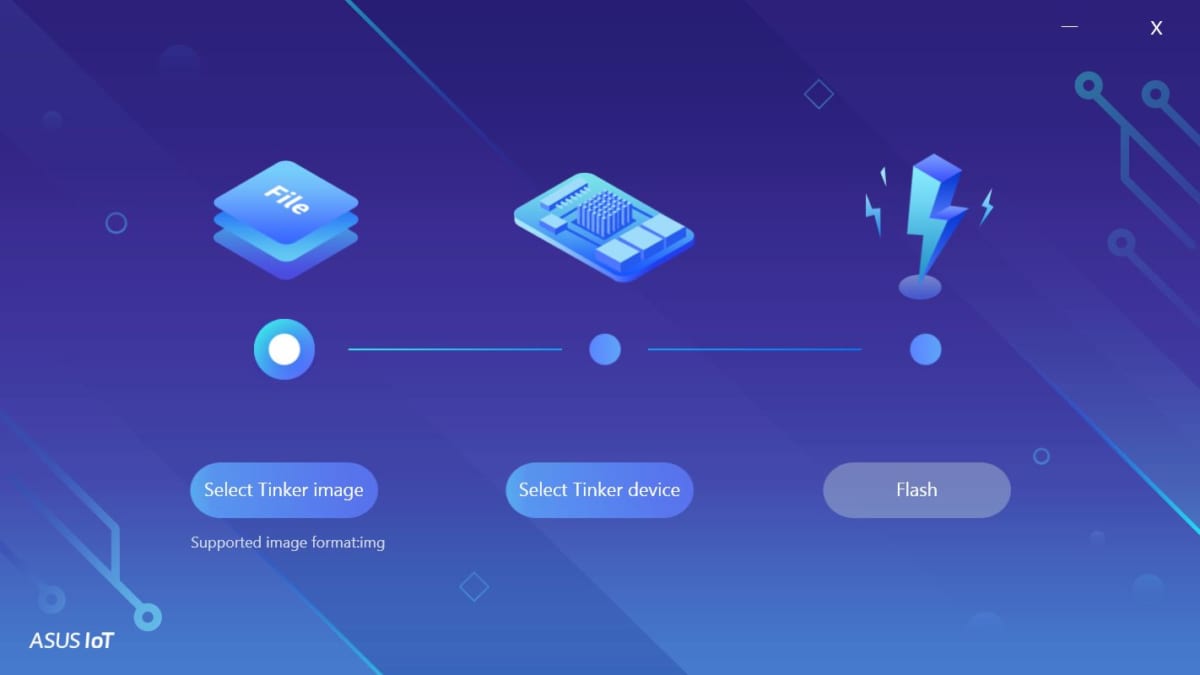
Tinker Edge Rは、16GbyteのeMMCを内蔵しています。
本稿では、このeMMCに、Tinker Edge R Debian OSをインストールする手順について説明します。
必要な機材
DOBOT Magicianのホームポジションを変更するには?
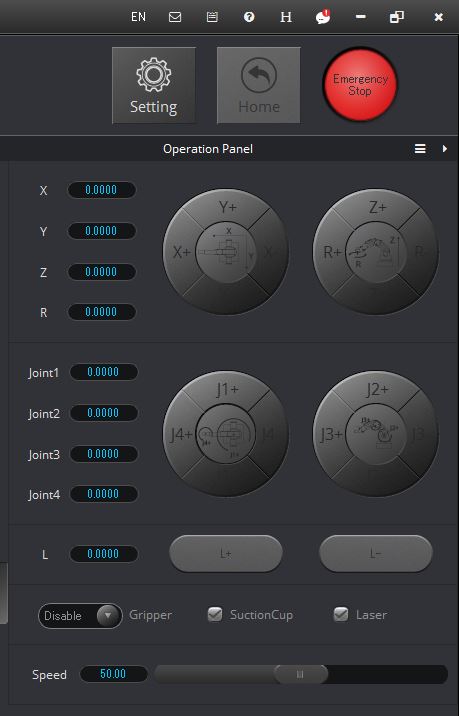
DOBOT Magicianには、操作の後に自動的にアームが向かう移動先が、2箇所あります。
1つは、DOBOT Magicianの電源ボタンを操作して本体の電源を落したときに、電源が切れる前に自動的にアームが向かう「格納位置」で、もう1つは、homingと呼ぶキャリブレーション動作を行った後に、自動的にアームが向かう「ホームポジション」です。
「格納位置」は変更できませんが、「ホームポジション」は設定により変更できます。
本稿では、(1)ホームポジションの変更が有効な場面を説明後、(2)具体的な変更方法と、(3)変更したホームポジションをデフォルトの設定に戻す方法について、説明します。
DOBOT Magicianのコネクタパーツの調達方法

DOBOT Magicianは、アーム上や台座背面に拡張コネクタが用意されており、外部とのI/Oとして使用できます。ここにセンサーやスイッチ、LEDなどの部品をつなぐことで、より応用が広がります。本稿では、接続可能なコネクタ部品の型番や入手方法をご紹介します。
なお、I/Oを利用する簡単な例として、外部にスイッチを接続し、DOBOT Magicianを外部からのトリガーで動かす例を下記にまとめておりますので、あわせて参照ください。
小型ロボットアームDOBOT MagicianをJetson Nanoからコントロールしてみよう!

小型ロボットアームDOBOT Magicianは、USB接続によりPCからもSBCからもコントロールできます。ロボットアームを制御するためのAPIは、共有ライブラリ(DLLもしくはshared object)として用意されているため、プログラミング言語はC++でもPythonでも選択でき、利用の幅が広がります。
ただし、DOBOT社から提供されている共有ライブラリは、Intel系のCPUのもののみです。SBCに多いARM系のCPUでDOBOT Magicianを制御するためには、ソースコードからコンパイルする必要があります。
ここでは、Jetson Nanoを例にとり、DOBOT MagicianをPythonから制御するための環境の整備方法をまとめます。
なお、以降の説明では、執筆時点で最新であるr32.3.1版のOSを前提としています。
Tinker Edge Tとは

Tinker Edge Tは、AI処理をアクセラレートするTPUを搭載したシングルボードコンピュータです。
類似のボードとして、Google Coral Dev boardがあり、核となるモジュールは同じものを使っていますが、Tinker Edge TはASUS社が開発したボードです。
主なスペック
両者のスペック比較は次の通りです。
DOBOT Magician V1とV2の違い

ロボットアームDOBOT Magician V2は、2018年11月より販売開始された新しい機種で、従来のV1(旧製品)と異なる点があります。
V1向けの周辺オプションの中には、V2に対応していないものがありますのでご注意ください。
主な違いについて、以下にまとめます。
Tinker BoardのOSの最新版はどこにありますか?

ASUS社のTinker BoardのページからTinkerOSをダウンロードしようとすると、リンク切れでダウンロードできない場合、次のページから最新版をダウンロードすることができます。
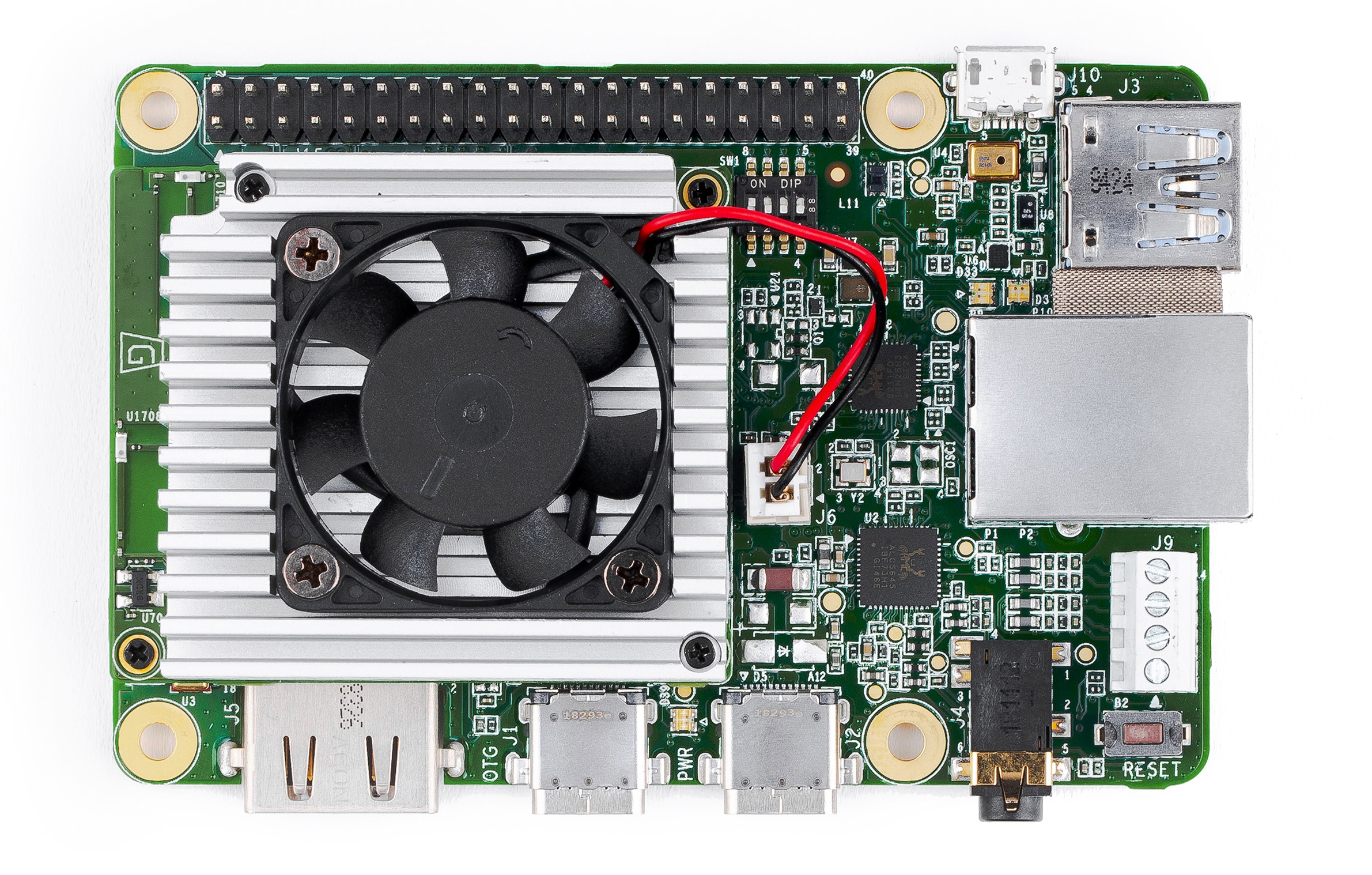
Google Coral Dev board とは
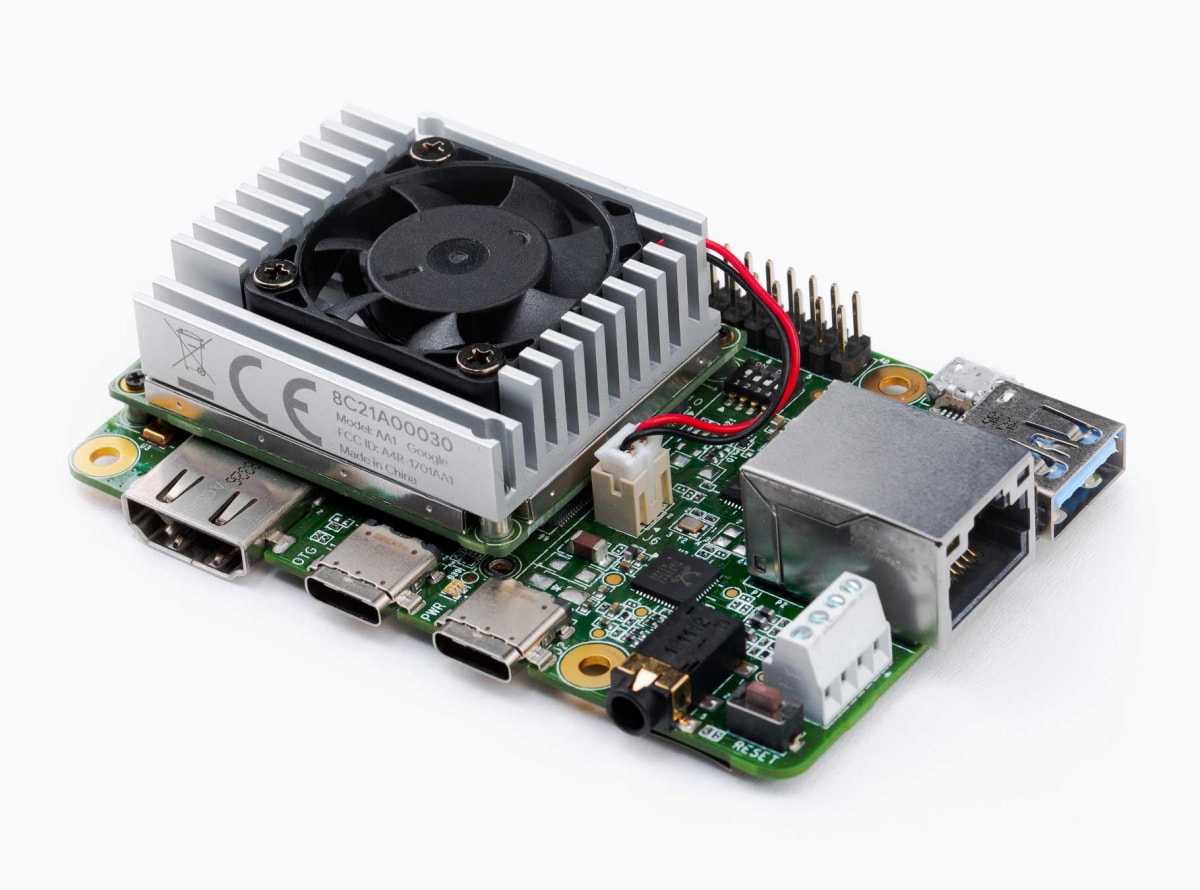
Google Coral Dev boardは、Googleが開発したSoM(System-on-Module)を搭載した小型のコンピュータボードです。
Raspberry Pi 4 Model B とは

Raspberry Piの新しいモデルRaspberry Pi 4 Model Bが、2019年6月に発表されました。Raspberry Pi 3 Model Bから、3年ぶりのメジャーバージョンのリリースとなります。
Raspberry Pi 4も、従来と同じサイズを保ちつつ、性能は向上し、インタフェース回りも強化されています。そのスペックをチェックしていきましょう。
「VRBOT D-1を走らせよう」サンプルプログラムと解説資料

VRBOT D-1は、Dobot社が開発した移動ロボットです。
Arduino IDEの開発環境を使ってプログラミングでき、ライントレースや超音波センサーによる障害物回避、XBeeモジュールを使ったZigBee通信などが可能です。
今回、PID制御によるライントレースのプログラムを作成し、実際に走行させたビデオをYoutubeにアップロードしました。
DOVision 1 (v2.0) サンプルプログラム
DOVision固定インフラカメラ型ロボットビジョンエントリーキット(v2.0) をご購入頂きありがとうございます。
本内容は、DoVision購入者向けのものです。 “DOVision 1 (v2.0) サンプルプログラム” の続きを読む
DO Visionサンプルプログラム
DO Visionをご購入頂きありがとうございます。
本内容は、初期バージョンのDoVision購入者向けのものです。
DoVision (v2.0)をお使いの場合は、こちらのページをご参照ください。 “DO Visionサンプルプログラム” の続きを読む
Do Visionカメラスタンド組立説明書

Do Vision カメラスタンド 組立説明書
Do visionをご購入頂きありがとうございます。
Do visionの組立て方法について説明いたします。
TinkerOS v2.0.7でChromiumが起動しない問題について
TinkerOS v2.0.7をインストール後、
sudo apt-get upgrade
を実行すると、Chromiumが起動しなくなる障害が出ております(2018年8月時点)。
ASUS社にて対応を進めておりますが、取り急ぎ、次の対処方法が提示されております。参考にしてください。 “TinkerOS v2.0.7でChromiumが起動しない問題について” の続きを読む
TinkerOS向け Xtion2 セットアップガイド
1. TinkerOS Debianのバージョン
Xtion2をサポートしているのは、TinkerOS Debian v2.0.7以降となります。
TinkerOS Androidは Xtion2に未対応です。 “TinkerOS向け Xtion2 セットアップガイド” の続きを読む
RaspbianOS セットアップ方法 (2018-06-27以降のバージョン)
RaspbianOSが2018-06-27版にアップデートされました。
2018-06-27版は、起動直後に設定ウィンドウが開くように変更されましたので、その手順をご紹介します。 “RaspbianOS セットアップ方法 (2018-06-27以降のバージョン)” の続きを読む
Raspberry Pi の micro SDをまるごとバックアップする方法
Raspbian OSのGUIメニューには、SDカードのコピー機能があり、サイズの違うSDカードにも対応しているため、通常はこの機能を使うのが便利です。 “Raspberry Pi の micro SDをまるごとバックアップする方法” の続きを読む