

本稿では、DobotStudio2020またはSCStudioで作成したMG400のプログラムをバックアップする方法を記載しています。
投稿者: HoshinaRyoutaro
MG400 ― キャリブレーション方法
アームに強い衝撃を加えた場合など、MG400の原点位置がずれてしまった場合には、ホームキャリブレーションが必要となります。
本稿では、MG400に同封されているキャリブレーションツールの使用方法を記載します。
注意:通常のプログラムでホーム位置を変更したい場合には、ユーザー座標系(User Coordinate)を使用してください。
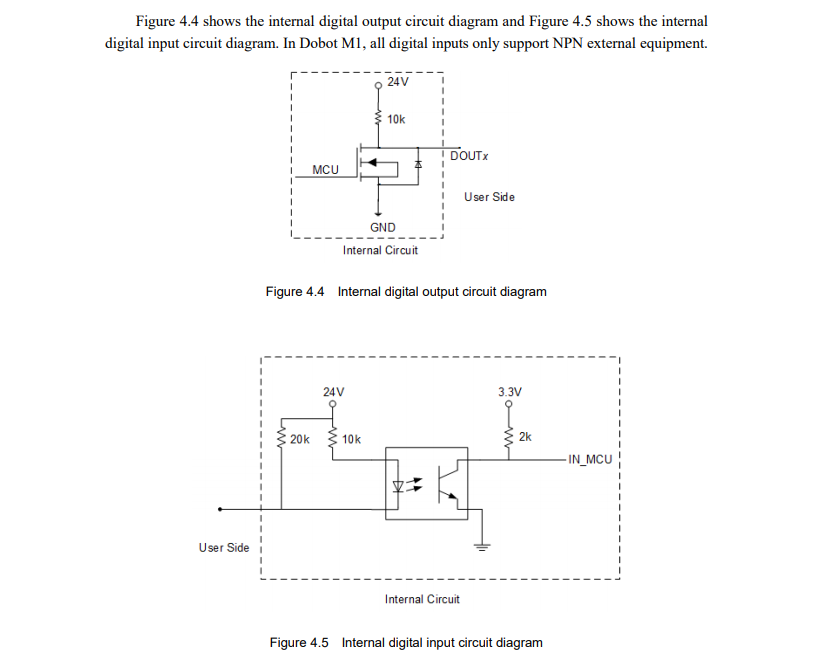
DOBOT M1 の内部回路
DOBOT M1 のデジタル入力は,Dobot-M1-User-Guide-V1.5.3の4.3.2.2 Base I/O Interface によるとNPNとなっているようです。
DOBOT M1 メインボード交換後の手順
メインボード交換後はZ軸のジョイントの値などでエラーが発生しますが、Homeコマンドを実行すると正常に使用可能となります。
Homeコマンドは Tools > Homeから可能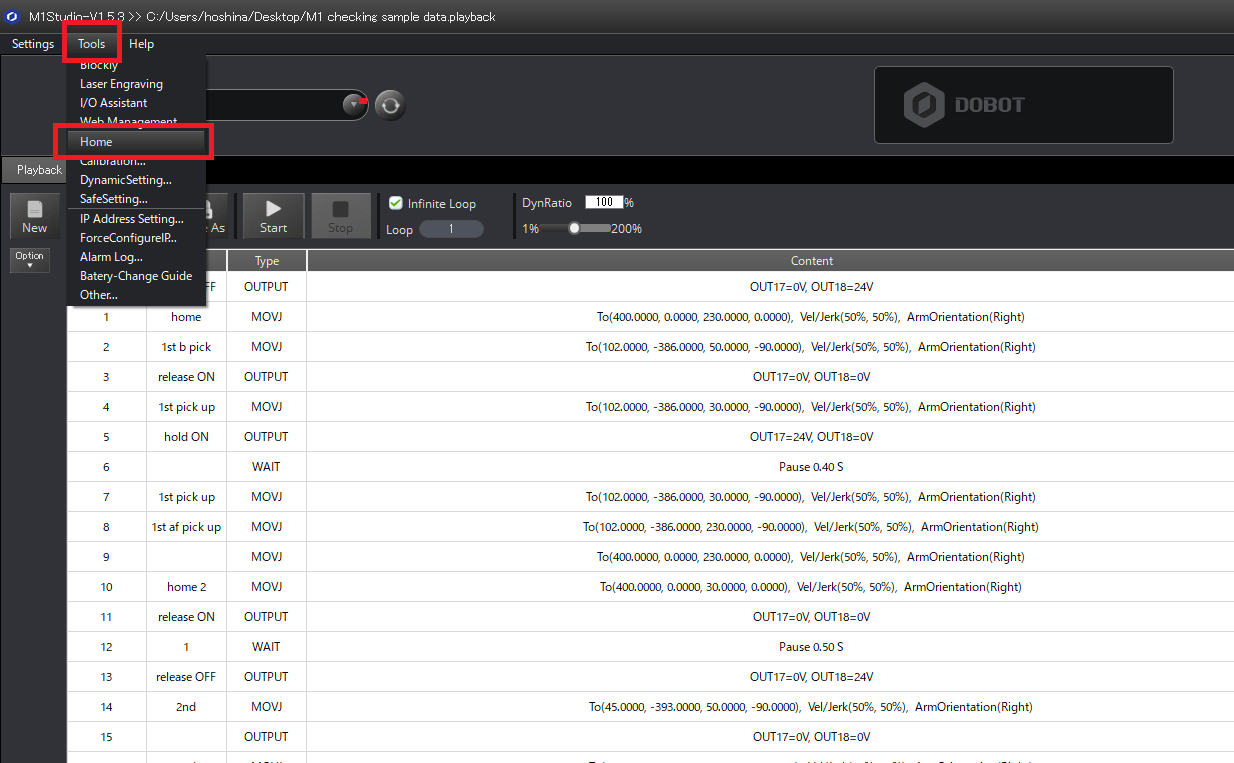
DOBOT M1 PCと接続できない場合のZ軸の下し方

DOBOT M1 の故障により,PCと接続ができない状況でM1の箱に入れるためにZ軸を下す方法を記載します。
MG400 UDP通信による外部機器とのやり取り
MG400のUDPで外部機器と通信する方法
MG400 Remote Control でプログラムが再開できない時
MG400のRemote I/O モードでプログラム終了後に再度startさせようとしたときに再開されませんでした。その対策を記載します。
Unitree A1 Lidar オプション ~ Jetson NX 内部でSLAMを起動する方法 ~
Unitree A1 Lidar オプション ~ Jetson NX 内部でSLAMを起動する方法 ~
“Unitree A1 Lidar オプション ~ Jetson NX 内部でSLAMを起動する方法 ~” の続きを読む
DOBOT Magician エアーポンプ関係 規格
DOBOT Magician エアーポンプ部分の規格を計測結果をもとにまとめました。
SCStudio ~ ユーザーの変更 ~
CRシリーズ操作用アプリ”SCStudio”にはユーザーというものがあり,ユーザーによって使える機能に制限があります。
今回、そのユーザーの変更方法を記載します。
CRシリーズ ~ エラーと対策 ~
CRシリーズのエラーと対策をまとめます。
Dobotstudio2020 のscriptを用いた操作
Dobotstudio2020 のscript(Lua)を用いた操作方法を記載します。
Unitree A1 Lidar SLAM – 運動コマンドの流れ
Unitree A1 Lidar オプションで自律移動をするときに速度命令がどのように流れているのかまとめました。
DOBOT Magician 10mmの移動で13mmの移動をしてしまう
お問い合わせ内容
Dobot Magician で dobot を p1(x:180,y:0)からp2(x:180,y:10)へ移動させたとき
p1~p2間の距離が≒13mmになっています
Dobot Magician で dobot を p1(x:180,y:0)からp2(x:180,y:10)へ移動させたとき
p1~p2間の距離が≒13mmになっています
[DOBOT Robot Vision Kit]Shell Moduleの使用方法
DOBOT Robot Vision Kit内で標準で用意されているサンプルscript functionを元に、Shell Moduleの使用方法を記載します。
Unitree A1 SLAMについて 1.概要
本記事ではUnitree A1 (Lidarオプション)でアプリケーションからSLAMを実行したときに内部のCPUでどのようなプログラムが実行されているのか確認していきたいと思います。
DOBOT CR5 Androidタブレットからの操作方法
CR5のAndoroidタブレットから操作する方法の説明を記載します。
本記事は下記URLのDobot CRStudio APP User Guide v3.7.0.9をもとに作成しています。
DobotMagician – EIO14出力モード時の内部回路
Dobot MagicianのEIOに関するドキュメント”Dobot Magician Interface description v2″(ダウンロードサイト)には入力モードの等価回路は乗っているのですが,出力モード時の等価回路が乗っていません。
そこで今回Dobot Magician のEIO14の出力モードの時の内部回路の等価回路を実験により求めました。
MG400 – 衝突検知機能の設定
MG400の衝突検知の設定方法
[DOBOT Robot Vision Kit] 円の検出
Robot Vision KitはDOBOT MagicianやDOBOT M1でビジョンシステムを素早く作成することができます。今回はその中でもよく使われる円検出について解説します。
MG400 – I/Oからプログラムを実行する方法
DobotMagicianの上位機種のMG400で,I/Oからプログラムを実行する方法を説明します。
Remote I/Oのプログラム作成についての注意点はこちら
DOBOT M1のシリアル番号とA9バージョンの確認方法
Dobot M1に問題が生じた際に、メーカーに問い合わせをする場合にはシリアル番号とA9のバージョンが必要となることがあります。今回はその2点を確認する方法をまとめさせて頂きます。
DOBOT M1のネットワーク接続の方法
USB Serial接続に加えてDOBOT M1はネットワーク接続でPCから操作することができます。その場合にはファームウェアアップデートやオフライン実行の機能が使用できるようになりとても便利です。しかしUSB Serial接続に比べネットワーク接続をする場合には、少し設定が必要で躓くポイントも多いため、そのため本記事でDobot M1とPCをネットワーク接続するまでの流れをまとめさせて頂きました。 “DOBOT M1のネットワーク接続の方法” の続きを読む
Raspberry PiでDOBOT M1を動作させよう!
DOBOTのサンプルプログラムのPython,C#,JAVAはDLLというものを参照しています。このDLLはC++で記述されているライブラリです。自分のOSにあったDLLがない場合は自分でコンパイルして作成することができます。今回はRaspberry Pi 3B+でDLLを作成し、それを使用してPythonでDOBOT M1を動作させる方法を記載します。動作している様子はこちら “Raspberry PiでDOBOT M1を動作させよう!” の続きを読む
DobotMagician プログラム内で滑らかに軌道に沿う動作を行う
Dobotで軌道に沿う動作を行う場合、軌道に沿うような複数の座標点を与えます。その際SetPTPCmdを使用すると、1つ1つの点で停止してしまい、滑らかな動作をしません。ここでSetCPCmdを使用します。このコマンドは、3Dプリントやレーザー彫刻の際に使われているコマンドで、複数の座標点を与えたときに連続的な動作を行うことができます。今回は円軌道に沿う動作を行うプログラム例に、軌道に沿う動作を行う方法を解説します。Dobot StudioのScripts環境で行った場合とC++11環境で行った場合の2種類の例を示します。