MG400のMACアドレスは工場出荷時に全て同じ値に設定されております。複数台連携時には、IPアドレスだけでなく、MACアドレスも重複しないよう変更しておく必要があります。
本稿ではMG400のMACアドレスの変更方法を記載しています。
MG400のMACアドレスは工場出荷時に全て同じ値に設定されております。複数台連携時には、IPアドレスだけでなく、MACアドレスも重複しないよう変更しておく必要があります。
本稿ではMG400のMACアドレスの変更方法を記載しています。
本稿ではMG400のI/Oの読み取りのタイミングが意図した場所とずれてしまう問題について、原因と対処法を案内しています。
MG400では、Remote I/Oモードに設定することでPCなしでスイッチなどのデジタルI/Oに接続した外部機器から事前に設定したプログラムの実行・停止などの制御を行うことができます。
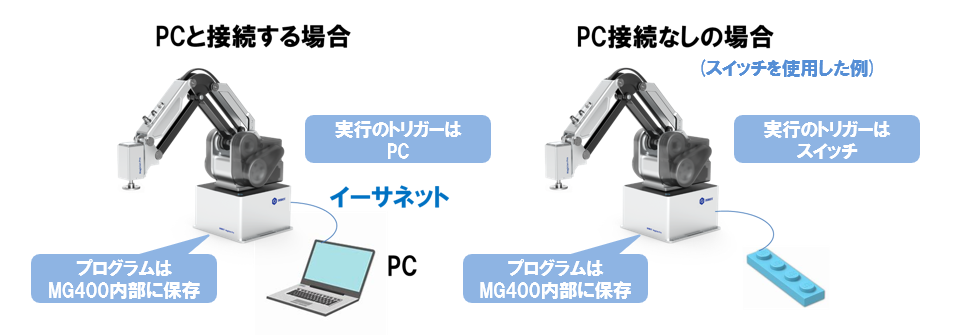
本稿では、Remote I/Oモードの設定方法をご紹介いたします。
本稿では、Dobot社が販売しているMG400純正オプションの小型電磁グリッパーのインストール方法について記載しています。
本稿では、Dobot社が販売しているMG400純正オプションのエアーポンプのインストール方法について記載しています。
MG400のアームに給電を行うと、手先部分のモーターから振動と異音が発生する場合があります。
本稿では、原因と対処法を記載しています。
本稿では、DobotStudio2020またはSCStudioで作成したMG400のプログラムをバックアップする方法を記載しています。
アームに強い衝撃を加えた場合など、MG400の原点位置がずれてしまった場合には、ホームキャリブレーションが必要となります。
本稿では、MG400に同封されているキャリブレーションツールの使用方法を記載します。
注意:通常のプログラムでホーム位置を変更したい場合には、ユーザー座標系(User Coordinate)を使用してください。
MG400は、制御ソフトウェアDobotStudio2020を使用することで、ティーチアンドプレイバック、Blockly、スクリプトによる制御を行うことができます。
本稿では、MG400の設置からDobotStudio2020に接続するまでの方法をご案内します。
本稿ではDOBOT MG400(Magician Pro)のスペックに関する事項を中心に、よくあるご質問と回答を記載しています。
産業用途を意識したモデルとして、従来のDOBOT Magicianと比べどのように進化しているのでしょうか。導入をご検討中の方は、こちらを参照いただければと思います。
MG400のUDPで外部機器と通信する方法
MG400のRemote I/O モードでプログラム終了後に再度startさせようとしたときに再開されませんでした。その対策を記載します。
Dobotstudio2020 のscript(Lua)を用いた操作方法を記載します。
MG400の衝突検知の設定方法
DobotMagicianの上位機種のMG400で,I/Oからプログラムを実行する方法を説明します。
Remote I/Oのプログラム作成についての注意点はこちら
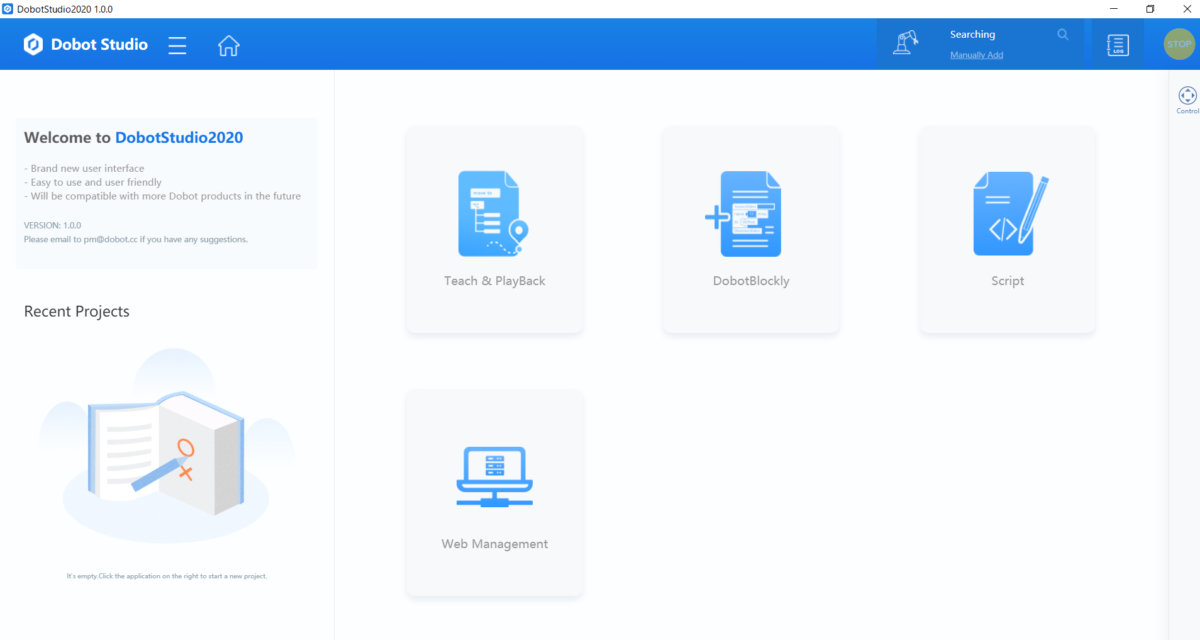
2020年9月、Dobotの操作を手軽に行えるソフトウェアの新バージョン、
DobotStudio2020(v1.0.0)
がリリースされました。(v1.0.0ではDobot M1のみ対応)
本稿より数回に分け、従来のM1Studioから大きく変化した点を見ながら、DobotStudio2020の紹介を行います。本稿では主な機能を利用するための玄関口となる「画面構成」に焦点を当て、簡単にご紹介いたします。
興味がございましたら、ぜひダウンロードセンター
https://www.dobot.cc/downloadcenter/dobotstudio2020.html#most-download
より入手した上でご体験ください。