
MG400では、Remote I/Oモードに設定することでPCなしでスイッチなどのデジタルI/Oに接続した外部機器から事前に設定したプログラムの実行・停止などの制御を行うことができます。
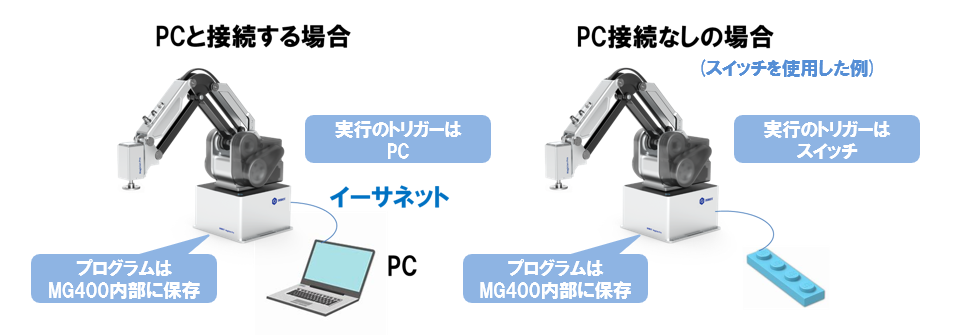
本稿では、Remote I/Oモードの設定方法をご紹介いたします。
・環境
OS: Windows10
ソフトウェア : DobotStudio2020 v1.3.0
使用するロボット製品: MG400 (Controller Firmware v1.5.3.5)
・設定方法
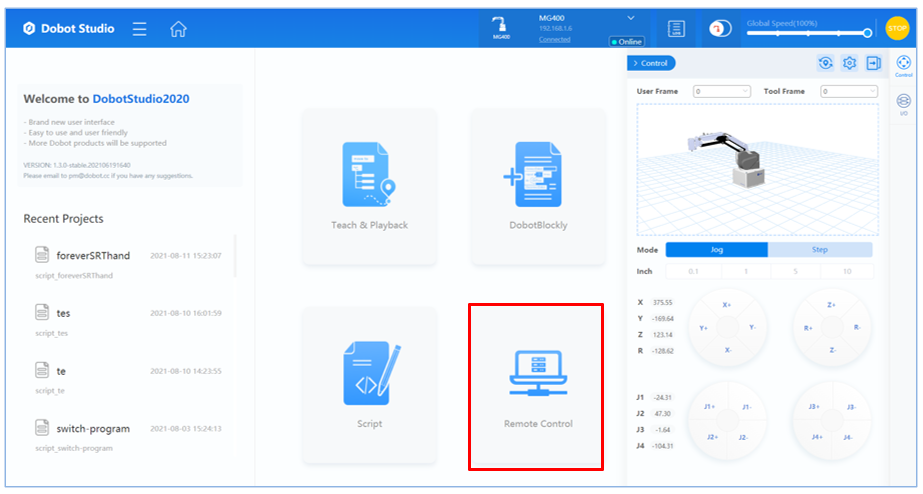
Step1
DobotStudio2020のホーム画面より、Remote Controlをクリックしてください。
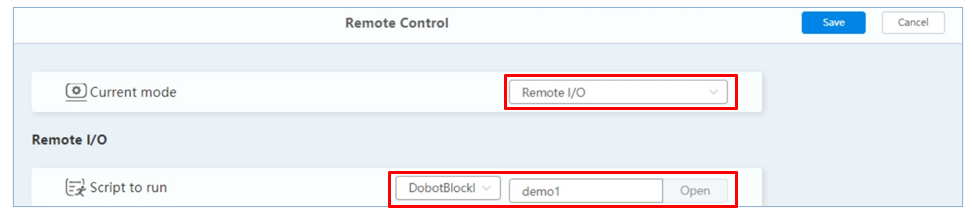
Step2
アームのモーターの給電がOFFになっていることをご確認ください(給電がONの状態ではモードの変更を行うことができません)。
Current ModeをOnlineからRemote I/Oに変更し、Script to runより起動したいプログラムを選択してください。
I/Oに対するコマンドの割り振りは次の通りです。

変更したい場合にはModifyをクリックしてI/Oの番号を割り当ててください。
使用しないコマンドには外部機器を接続しなくても問題ありませんが、重複しないようにI/Oの番号を割り当ててください。
OutputにLEDを接続することで、ステータスを出力することも可能です。
Step3
Saveをクリックしてください。
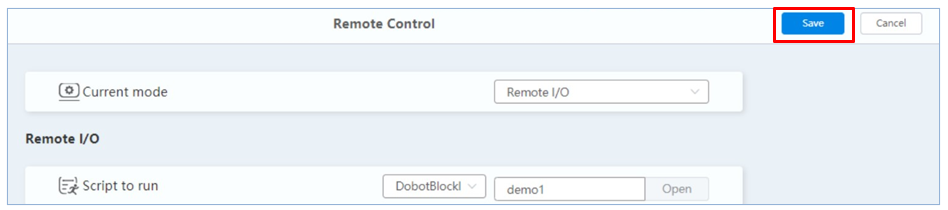
設定が完了すると、MG400のステータス表示はOnlineからRemote I/Oに変更されます。

以上の操作を行うことによって、PCとの切断を解除してもスイッチからプログラムを実行することができます。
再度PCと接続してコントロールしたい場合には、Current ModeをOnlineに変更してください。
・Remote I/Oモードに対応しているコマンド
Start:サーボのON、指定したプログラムの実行
Pause:プログラムの一時停止
Resume:Pauseで一時停止した場所からプログラムを再開する
Stop:プログラムの停止、サーボのOFF
Emergency stop:プログラムの停止、サーボのOFF
Clear alarm:エラーの解除
- 電源投入後にはサーボがOFFになっておりますので、Startでプログラムを実行する必要があります。
- Stopでプログラムを停止した場合には、Startでプログラムを最初から実行してください。Pauseで一時停止した場合には、Resumeで再開してください。
- 衝突検知含むエラーが発生している場合には、Clear alarmで解除することができます。
- Emergency stopは緊急停止ボタンを押した場合と同じ動作(エラー発生)をするはずですが、2021年9月現在Stopと同じ挙動が確認されています。今後修正されることが予想されます。
・エラーが発生し、プログラムを実行できない場合
現在、一部の環境でRemote I/Oモードに設定したMG400の再起動後にエラーが発生しプログラムを実行できない不具合が発生しております。
こちらの問題につきましては個別に対応を行っておりますので、dobot@techshare.co.jpまでご相談ください。
その他にもご不明点等ございましたら、お気軽にご質問ください。