

MG400のアームに給電を行うと、手先部分のモーターから振動と異音が発生する場合があります。
本稿では、原因と対処法を記載しています。
MG400はアームの給電時に、ペイロード(エンドエフェクターを含めた荷重)を設定する必要があります。
このペイロードの設定が実際の荷重に対し比較的大きい場合に、J4のモーターから振動と異音が発生する場合があります。
特にエンドエフェクターを外した際にペイロードを変更し忘れるケースが発生しておりますので、ご注意ください。
ペイロードの変更方法
・Dobot Studio2020をご使用の場合
Settings > Load Params を開いていただくことにより、変更することができます。Payloadに適切な重量を入力してください。
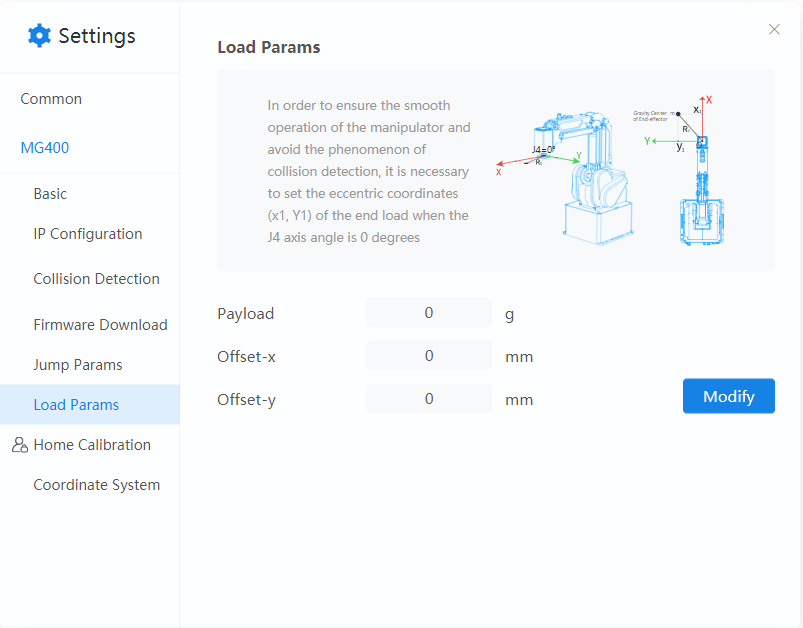
また、Offset-x, Offset-yでは荷重の重心を変更することができます。エンドエフェクターが正常に動作しない場合は、こちらの設定をご確認ください。
・SCStudioをご使用の場合
Settings > Load Params を開いていただくことにより、変更することができます。LoadValueに適切な重量を入力してください。
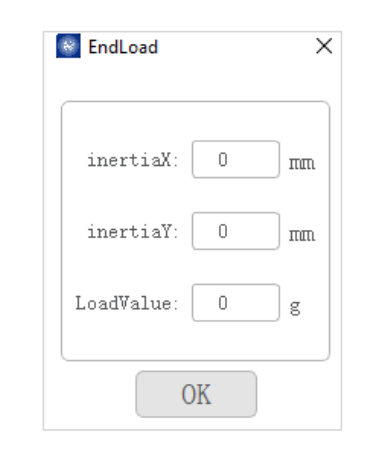
また、inertiaX, inertiaYでは荷重の重心を変更することができます。エンドエフェクターが正常に動作しない場合は、こちらの設定をご確認ください。
ご不明点等ございましたら、お気軽にdobot@techshare.co.jpまでお問い合わせください。