

Dobot Magicianは、力が加わることによってアームに歪みが生じ、測位精度が低下してしまう場合があります。この場合、キャリブレーションを行うことによって、アームのずれを校正することができます。
本稿では、Dobot Magicianのキャリブレーションが必要な状態やその方法について記載しています。
内容
はじめに
Dobot Magicianのキャリブレーションには、ベースキャリブレーション、センサーキャリブレーションの大きく分けて2つの方法があります。ベースキャリブレーションでは、エンコーダの搭載された1軸の調整を行うことができます。センサーキャリブレーションでは、角度センサーの搭載された2, 3軸の調整を行うことができます。さらに、センサーキャリブレーションには、正確な手動レベリングと簡単で迅速な自動レベリングの2つの方法があり、用途によって使い分けることができます。
まずは、お使いのDobot Magicianがキャリブレーションを必要としている状態であるかお確かめください。
注意:Dobot Magicianは脱調や傾斜のある場所での使用によって、座標にずれが生じます。脱調した場合にはホーミング動作を行うことによって、正しい座標を取得することができるようになります。キャリブレーションを行う前に使用環境や脱調が起こっていないかをご確認ください。
1.ベースキャリブレーション(1軸の調整)
ベースキャリブレーションが必要な状態とは?
ベースエンコーダは、出荷前にキャリブレーション済みです。 通常、ホーミング後のJ1の角度は0°です(ホームポイントがデフォルトの(250, 0, 0, 0,)の場合)。このとき、アームは基台の前方、中心にあります。ホーミング後にJ1の角度が0°(誤差1°-3°以内)でない場合は、ベースエンコーダのキャリブレーションを行う必要があります。
必要なもの
・ライティング&ドローイングキット
・センサーキャリブレーションボード
手順
Step 1
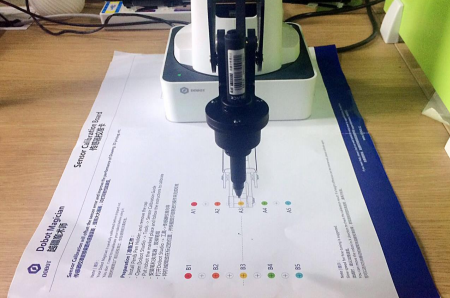
ライティング&ドローイングキットを装着したDobot Magicianをセンサーキャリブレーションボード上の正しい位置に設置してください。
Step 2
(任意で行ってください)ペン先がセンサーキャリブレーションボードの表面に接触するようにホームポジションを設定する。
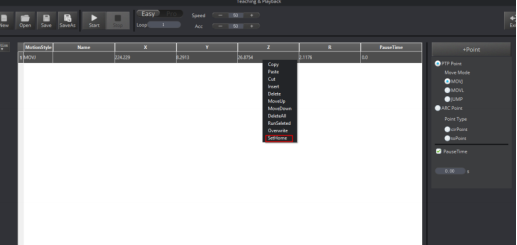
- DobotStudio上で”Teaching&Playback”アイコンをクリックします。
- ハンドティーチングボタンを押してアームのロックを解除し、ペン先がセンサーキャリブレーションボードの表面に接触するようにアームを移動させ、ハンドティーチングボタンを離します。
- 移動した点の座標が画面に表示されるので、この座標を右クリックし、SetHomeを選択します。
Step 3
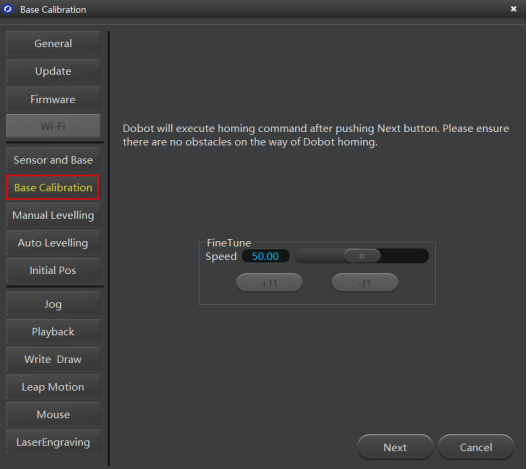
Dobot Magicianと接続したDobotStudio上からSetting > Base Calibrationを開いてください。
Step 4
Dobot Magicianの周りに障害物がないことを確認し、”Next”をクリックしてください。Dobot Magicianがホーミング動作を開始します。
Step 5
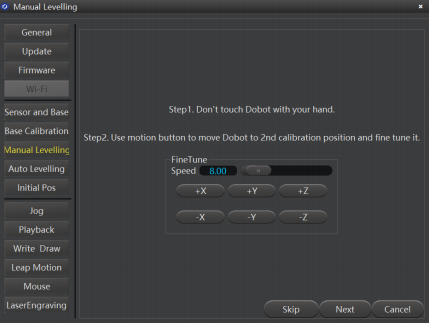
Manual Levelling のページの+J1, -J1ボタンを操作し、ペン先がキャリブレーションボードのA3とB3を結ぶ直線上に位置するように調整を行ってください。 アームの移動速度はスライダーから変更することができます。調整後、”Calibration”をクリックします。
2.センサーキャリブレーション(2, 3軸の調整)
センサーキャリブレーションが必要な状態とは?
前腕と後腕の角度センサーは、出荷前にキャリブレーション済みです。通常、Dobot Magicianを同じ水平面上の場所に移動しても、Z座標は同じままです。ライティング&ドローイング、3Dプリント中にペンが浮いてしまう場合は、精度を向上させるために手動または自動レベリングで角度センサーをキャリブレーションする必要があります。
2.1 手動レベリング
DobotStudio、センサーキャリブレーションボード、ライティング&ドローイングキットを使用して手動でキャリブレーションを行います。自動レベリングよりも正確で、絶対的な座標精度が要求されるアプリケーションに適しています。
必要なもの
・ライティング&ドローイングキット
・センサーキャリブレーションボード
手順
Step 1
Dobot Magicianをセンサーキャリブレーションボード上の正しい位置に設置してください。
Step 2
Dobot Magicianと接続したDobotStudio上からSetting > Manual Levellingを開いてください。
Step 3
Dobot Magicianからすべてのエンドエフェクターが取り外されていることを確認し、”Next”をクリックしてください。システム設定に従った前腕と後腕の角度センサー係数の自動補正が行われますので、アームに触れないように注意してお待ちください。
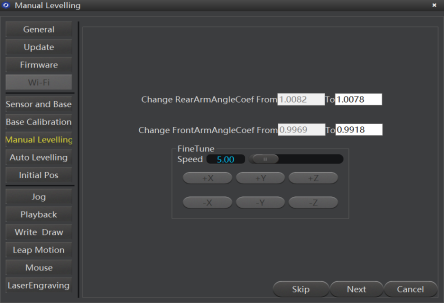
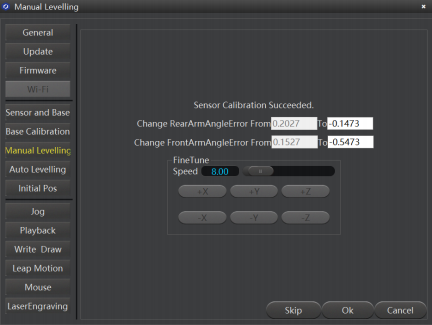
前腕と後腕の角度センサー係数(ArmAngleCoef)の自動補正結果が表示されたら、”Next”をクリックしてください。
Step 4
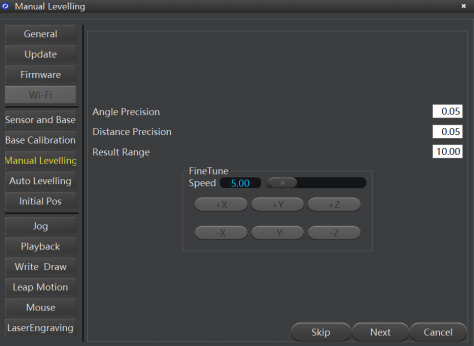
角度精度(Angle Precision)、距離精度(Distance Precision)、結果の範囲(Result Range)の設定画面が表示されますが、このステップでは変更を行わずデフォルトのままにします。”Next”をクリックしてください。
Step 5
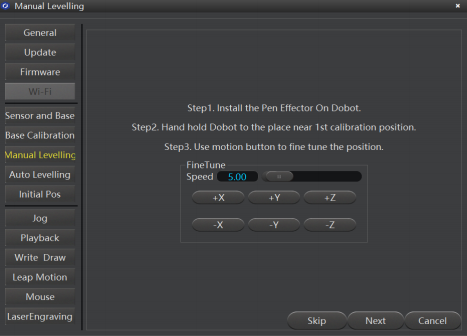
Manual Levelling のページの指示に従って、アームを最初のキャリブレーションポイントに動かしてください。キャリブレーションポイントがセンサーキャリブレーションボードのA3の場合、
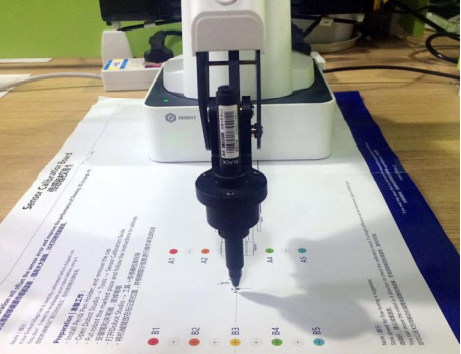
- Dobot Magicianにライティング&ドローイングキットを装着してください。
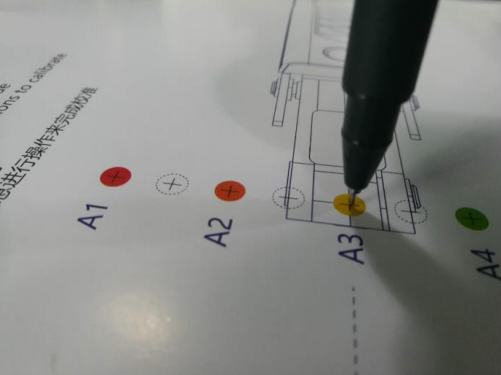
- ハンドティーチングボタンを押してアームのロックを解除し、ペン先がセンサーキャリブレーションボードのA3の近くになるようにアームを移動してください。
-
Manual Levelling のページのX, Y, Zボタンを操作し、ペン先がキャリブレーションボードのA3の中心に位置するように調整を行ってください。 アームの移動速度はスライダーから変更することができます。調整後、”Next”をクリックします。
Step 6
Manual Levelling のページの指示に従って、アームを次のキャリブレーションポイントに動かしてください。
- Step 5とは異なり、今度はハンドティーチを使いません。
- キャリブレーションポイントがセンサーキャリブレーションボードのB3の場合、Manual Levelling のページのX, Y, Zボタンからアームの移動を行ってペン先がキャリブレーションボードのB3の中心に位置するように調整を行ってください。調整後、”Next”をクリックします。

Step 7
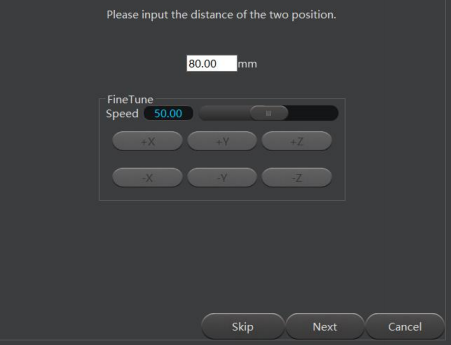
キャリブレーションポイントの2点間の距離を設定します。センサーキャリブレーションボードのA3とB3を使用した場合、この距離は80.00mmですので、デフォルトのままで変更する必要はありません。”Next”をクリックすると、キャリブレーションが開始されます。
2.2 自動レベリング
DobotStudioとツールを使用して簡単かつ迅速に自動でキャリブレーションを行うことができます。これは、書き込みや描画、3D印刷など、絶対的な座標精度をあまり必要としないアプリケーションに適しています。
必要なもの
・自動レベリングツール
・センサーキャリブレーションボード
手順
Step 1
Dobot Magicianを水平な台の上に置いてください。
Step 2
アームの手先のネジを用いて自動レベリングツールをDobot Magicianに固定します。


Step 3
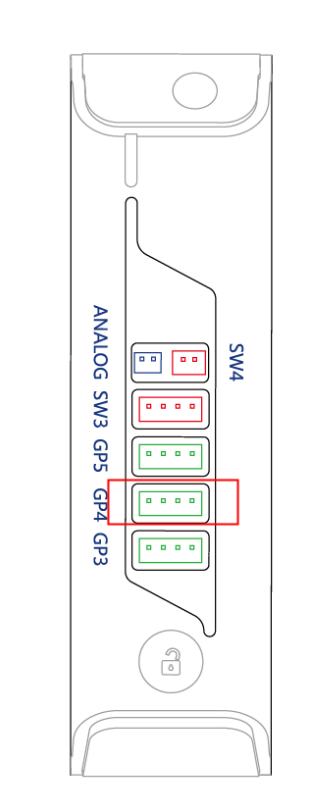
自動レベリングツールのケーブルを、前腕のGP4のコネクタに接続してください。
Step 4
Dobot Magicianと接続したDobotStudio上からSetting > Auto Levellingを開いてください。
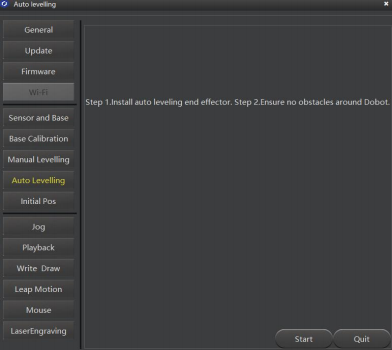
Step 5
Dobot Magicianの周りに障害物がないことを確認し、”Start”をクリックしてください。自動レベリングが完了するまで、2分ほど時間がかかります。
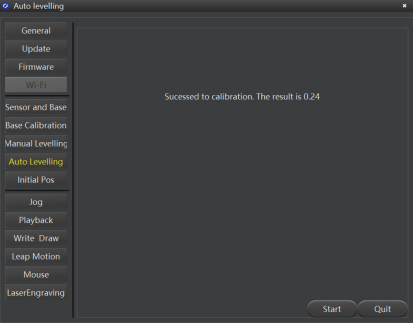
※自動レベリングに失敗する場合は、台が水平であることを確認してください。
ご不明点等ございましたら、お気軽にdobot@techshare.co.jpまでお問い合わせください。