
Raspberrypi On ZumoをPCなどのVNC画面からリモコンで操作します。取り付けた超音波センサーにより、障害物があると停止するようにします。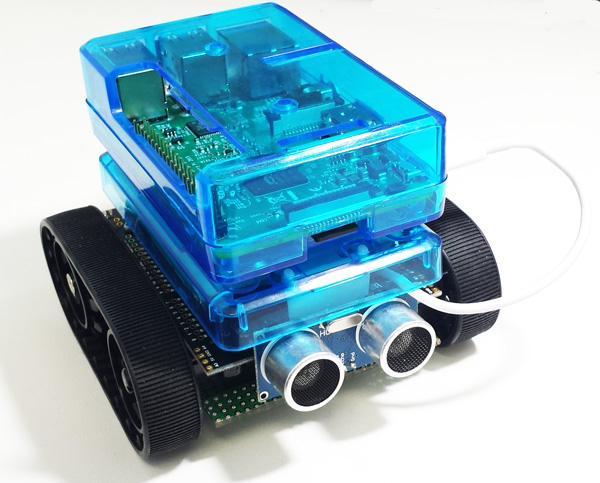
- 超音波モジュールの製作
- Arduino Leonardoのプログラム
- RaspberryPi のリモコンプログラム
超音波モジュールの取り付け
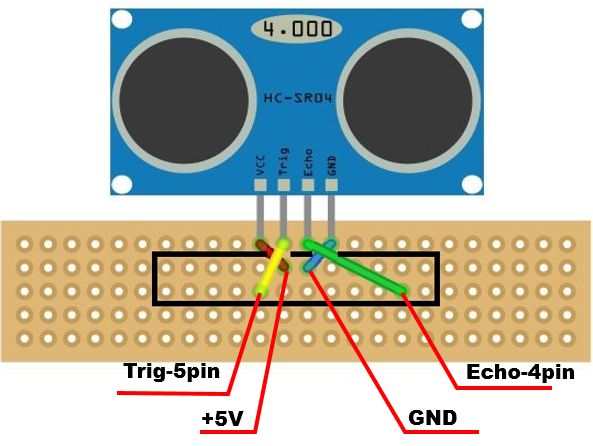
汎用基板を12×24ピッチの大きさに切り、図のように超音波センサー、ピンヘッダー2×12を取り付けます。
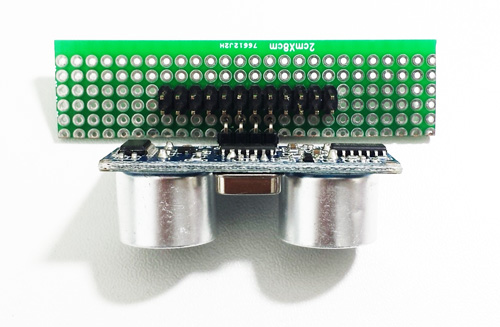
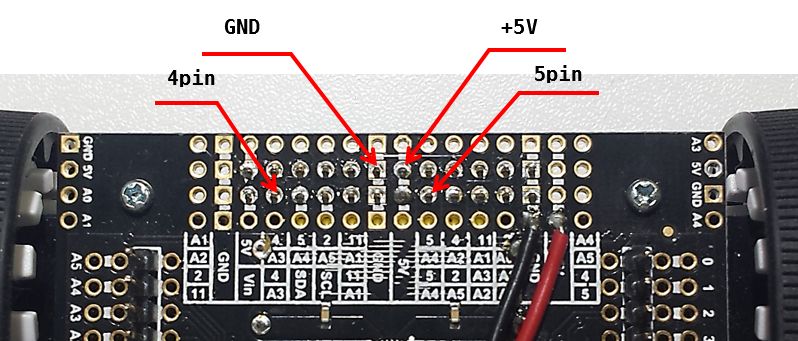
ボードの裏面の配線は下のようにします。
超音波センサー基板をZumo前面の下部に取り付けます。
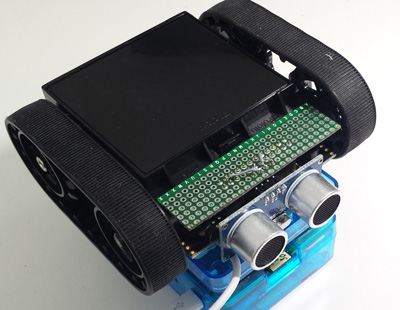
汎用基盤が段差に引っかかってしまい、ピンが奥まで刺さらない場合がありますので、基盤のZUMO側の部分は切り取る、削るなどの処理を行ってください。基盤は下からはめるため、重力によってはずれやすくなっております。しっかり差し込んでご使用ください。
Arduino Leonardoに超音波処理のプログラム・RaspberryPiのPythonプログラムをアップロードする
前もってやっておかなければならないこと:本サイト RaspberryPi On ZumoのWi-Fiコントロールシステム(WebIOPI)構築の手引き
を参照して、次の2点を行ってください。
- RaspbianにArduino開発環境をダウンロードします(下記リンク 4.参照)
- ZumoMotorLibraryをダウンロードします(下記リンク5.参照)
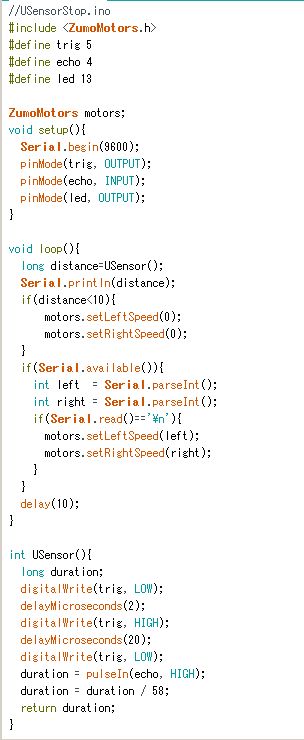
その上で、次のArduinoプログラムをLeonardoにアップロードします。
Arduinoプログラムは次のとおり
ダウンロードリンク
UsensorCode
次のプログラムをRaspberryPiデスクトップ上でPython2.7を使って走らせる。(このコードも上のダウンロードファイル
UsensorCodeに含まれます)
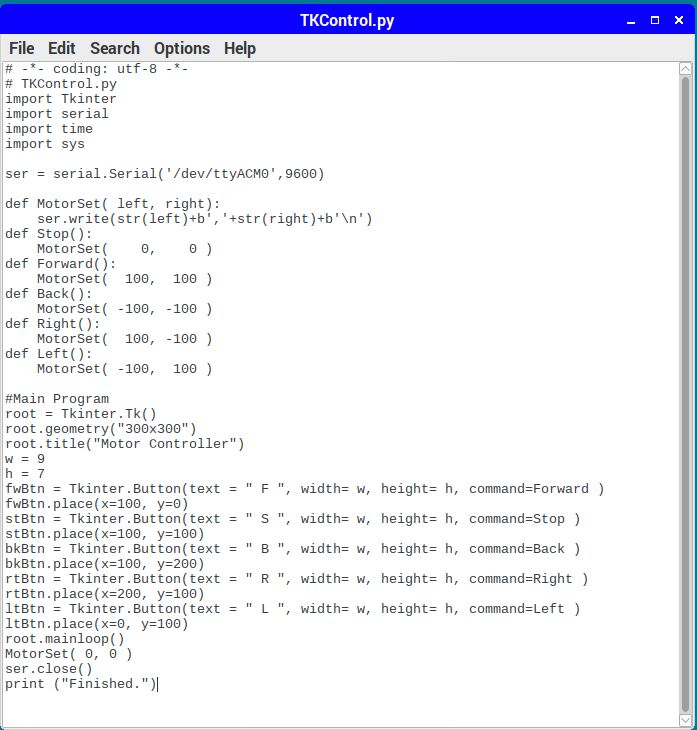
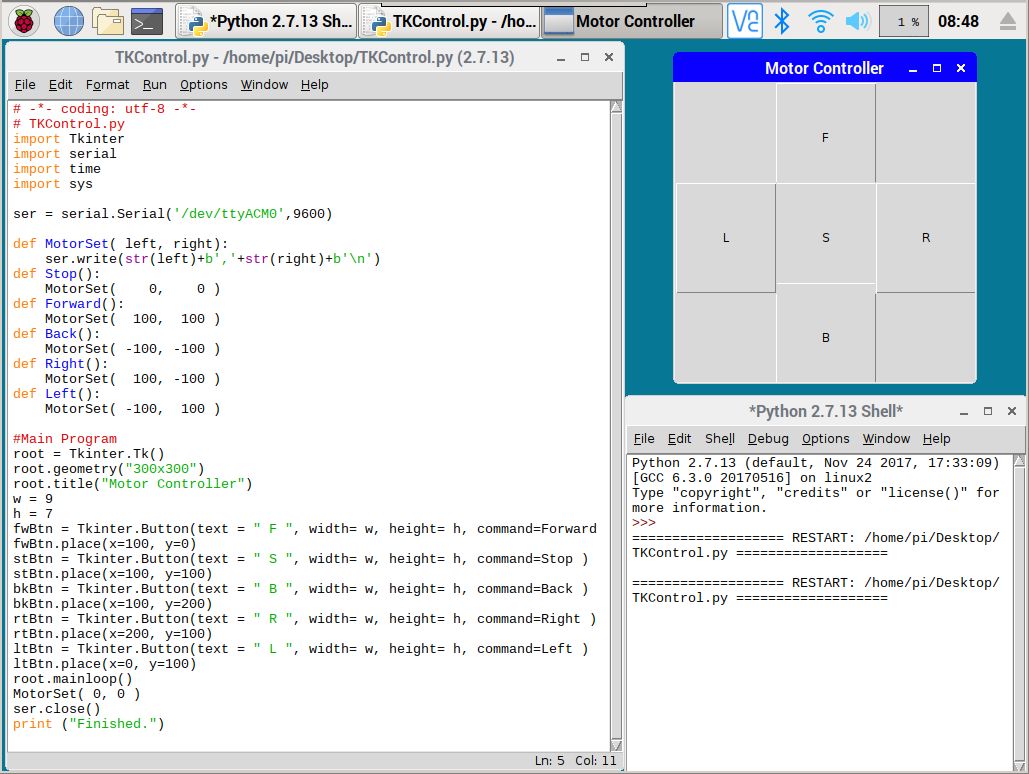
このプログラムをRaspberrypi上で走らせるとTkInterを利用してボタンでコントロールできるようになります。
ただし、RaspberrypiOnZumoを走らせるときはVNCを利用してリモートコントロールで動かします。
動作は:10cm以内の障害物に接近すると、Zumoはストップします。それ以外は下のTkInterのボタンで前進・後退・左旋回・右旋回をコントロールできます。終了はMotor controllerのボタンウィンドウを閉じます。
<終わり>