
以下はwww.raspberrypi.org/blog に掲載された記事の要約です。 “Raspbian Stretchがアップデート:異なるスクリーン解像度をサポート” の続きを読む
投稿者: kazuo.mori
Raspberrypi On Zumo Python TkInterによる操縦・超音波センサによる停止
Raspberrypi On ZumoをPCなどのVNC画面からリモコンで操作します。取り付けた超音波センサーにより、障害物があると停止するようにします。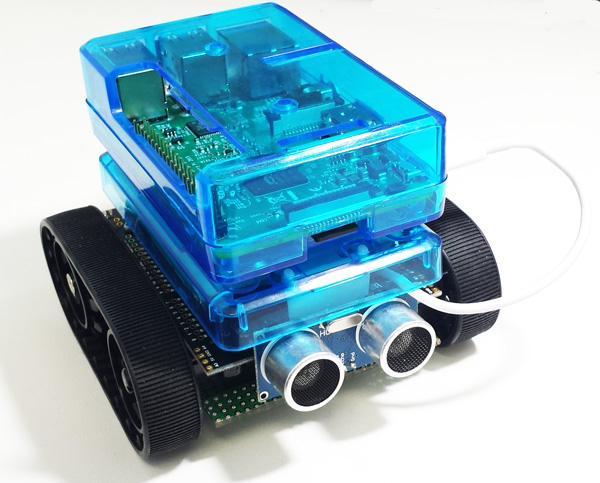
- 超音波モジュールの製作
- Arduino Leonardoのプログラム
- RaspberryPi のリモコンプログラム
“Raspberrypi On Zumo Python TkInterによる操縦・超音波センサによる停止” の続きを読む
RaspberryPi日本語入力 iBus-anthy を入れる
LxTerminalからiBus-anthyをダウンロードする
$ sudo apt-get update
$ sudo apt-get install ibus-anthy “RaspberryPi日本語入力 iBus-anthy を入れる” の続きを読む
RaspberryPi日本語入力 fcitx-mozcを入れる
あらかじめ国別・キーボード設定などを行います。
menu>Preference>Raspberry Pi Configurationと選びます。 “RaspberryPi日本語入力 fcitx-mozcを入れる” の続きを読む
RaspberryPi で Virtual Keyboardを使う
LCDの画面上にキーボードを表示させてタイプできるようにする方法です。 “RaspberryPi で Virtual Keyboardを使う” の続きを読む
TinkerBoardでRemoteDesktop(VNC)を使う
1.TinkerOSにTightVncServerをインストールし、起動する
LXTerminalから次のコマンドでインストールします。 “TinkerBoardでRemoteDesktop(VNC)を使う” の続きを読む
Raspberry PI 3 の無線LANに固定IPアドレスを設定する
RaspberryPiのネットワークアドレスを調べる
lxterminalで次のようにタイプして、Raspiの現在のネットワークの状態を確認します。 “Raspberry PI 3 の無線LANに固定IPアドレスを設定する” の続きを読む
RaspberryPiのVNC設定方法
RaspberryPiの設定
RaspberryPiデスクトップ上で メニュー>設定>Raspberry Piの設定 を選ぶ。
VNCを「有効」にします。 “RaspberryPiのVNC設定方法” の続きを読む
RaspberryPi On ZumoのWi-Fiコントロールシステム(WebIOPI)構築の手引き
RaspberryPiOnZumoのWi-Fiコントロール(WebIOPi)システム構築の手引き
スマホやパソコンのブラウザから構内のWi-Fiステーション経由でRaspberryPiOnZumoを
操縦するシステムを構築します。WebサーバーにはWebIOPiを使用します。
コードを入手する→codes “RaspberryPi On ZumoのWi-Fiコントロールシステム(WebIOPI)構築の手引き” の続きを読む