
内容
RaspberryPiOnZumoのWi-Fiコントロール(WebIOPi)システム構築の手引き
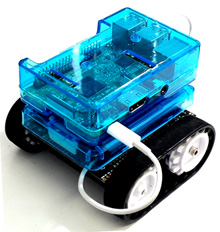
スマホやパソコンのブラウザから構内のWi-Fiステーション経由でRaspberryPiOnZumoを
操縦するシステムを構築します。WebサーバーにはWebIOPiを使用します。
コードを入手する→codes
RaspberryPiOnZumoについてのFAQ
1.Arduino LeonardoにアップロードしたCommandReceiver.inoのプログラムの意味がよくわからないのですが。
・Arduinoのプログラムは最初に1回だけ実行されるsetup()関数と,その後繰り返し実行されるloop()関数からできていて,
プログラムはその中身を書くことになります。
・setup()関数内でUSBシリアル通信の初期化をSerial.speed(9600)命令で通信速度9600baudに設定します。
・次にloop()関数内で,Serial.available()関数により通信データがあるか調べ,あれば一文字(コマンド)を変数cに読み取り,
その文字の種類によって,モーターを制御しています。
・arduinoのシリアル通信命令についてはArduino.ccのserial以下をご覧ください。
https://www.arduino.cc/reference/en/language/functions/communication/serial/
2.Arduinoにモーターコントロールプログラムを書き込むとエラーが出てうまく書き込めません。
・ZumoMotorLibraryの場所が違っている可能性があります。 /home/pi/sketchbook/library/Zumo-shield/ZumoMotors
というディレクトリ構造になっているか確認してください。
・ArduinoIDEから ツール>シリアルポート を確認してください。 /dev/ACMA0となっているか、たとえば/dev/ACMA1などに
なっていたら、 RaspberryPiとArduinoがUSBケーブルで接続された状態で、RaspberryPiを再起動してください。
( $ sudo reboot now )その後、/dev/ACMA0になっていることを確認してください。
3.WebIOPiを起動するとデモページが立ち上がってしまう。
・/etc/webiopi/configファイルが書き換えられていません。11.の項目をもう一度よくチェックして下さい。
デスクトップ環境から直接configファイルをleafPad(エディタ)で開くと、書き込みができません。
lxterminalを立ち上げ、その中で sudo leafpad /etc/webiopi/configとして編集し、保存する必要があります。
これは /etc/rc.localの編集、書き込みについても同じです。
※現在、WebIOPiのバージョンによってconfigファイルのパスが異なる場合が確認されています。(2021.6.15追記)
作成時のバージョン: /etc/webopi/config /etc/webiopi/config.bak
現在確認されているバージョン: /etc/WebIOPi-0.7.1/python/config /etc/WebIOPi-0.7.1/python/config.bak
4.ブラウザからRasPiのアドレスにアクセスしてもボタンのついたページが表示されない。
・ index.htmlファイルが文法的に正しくない。10.のリストと比べて字句が正しいかチェックして下さい。
5.プッシュボタンを押してもRasPiが終了しない。
・プッシュボタンが26, 27ピンに間違いなく差してあるか確認する。
・shutdown.pyのリストをもう一度確認してください。
・shutdown.pyの場所を確認してください。
・/etc/rc.local の内容を確認してください。