Unitree A1 Lidar オプション ~ Jetson NX 内部でSLAMを起動する方法 ~
Jetson NX 内
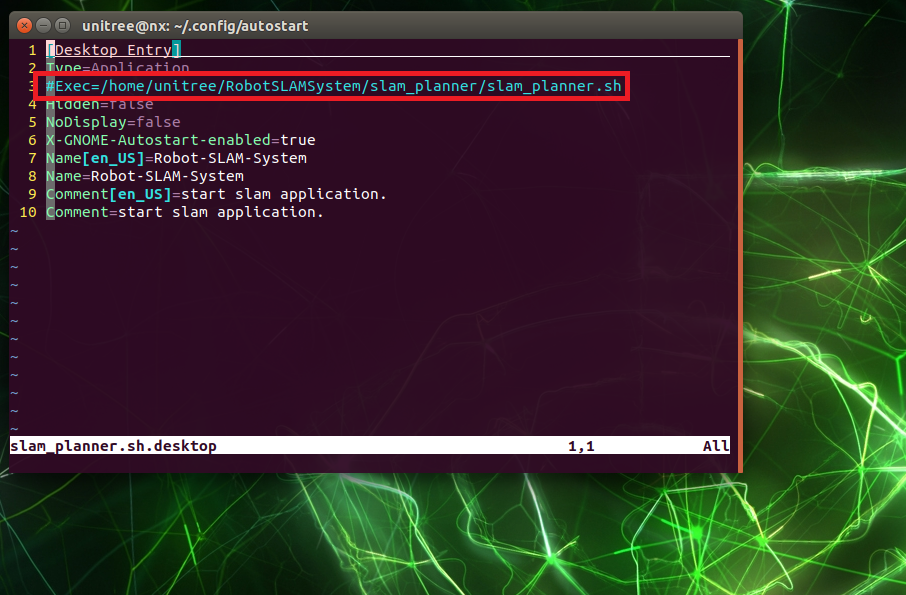
1.自動起動の停止
cd ~/.config/autostart/
slam_lanner.sh.desktop内Execの行をコメントアウト
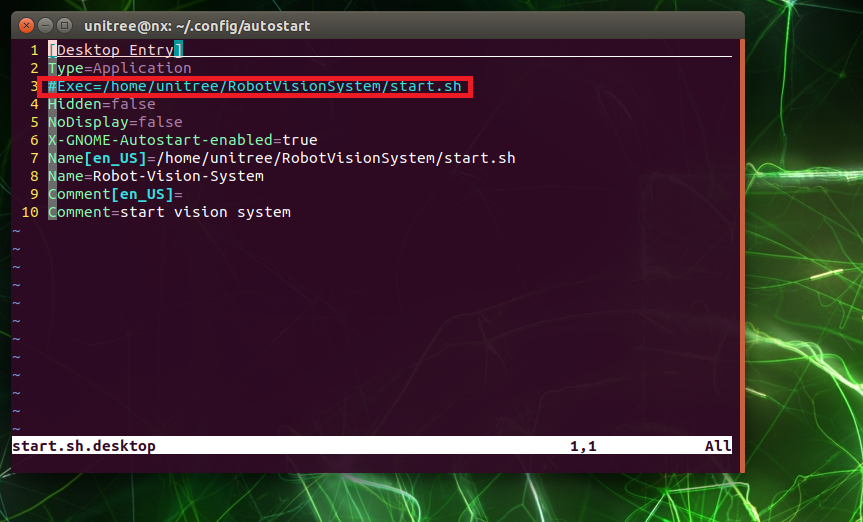
start.sh.desktop内Execの行をコメントアウト
再起動
reboot
2.SLAMの起動
2.1.sportモードへの切り替え
ジョイスティックコントローラにて
A1伏せ,モータ脱力状態時にL1 + start
2.2.SLAM立ち上げ
roslaunch slam_planner slam_planner_online.launch
2.3.lcm_serverの起動(パスワード:123)
cd ~/unitree_legged_sdk/build
sudo ./lcm_server_high
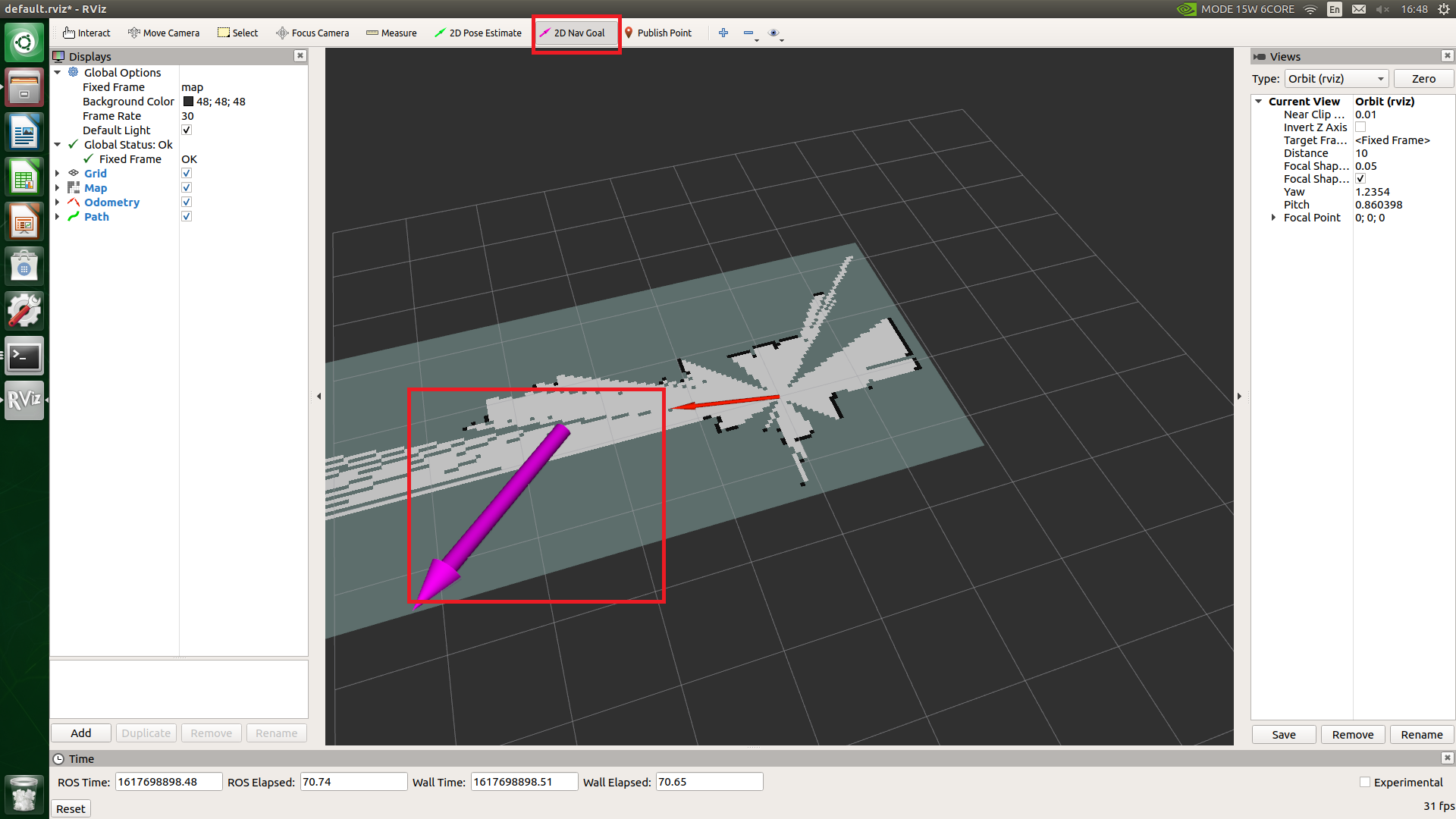
4.goalの送信
rvizの起動
rviz
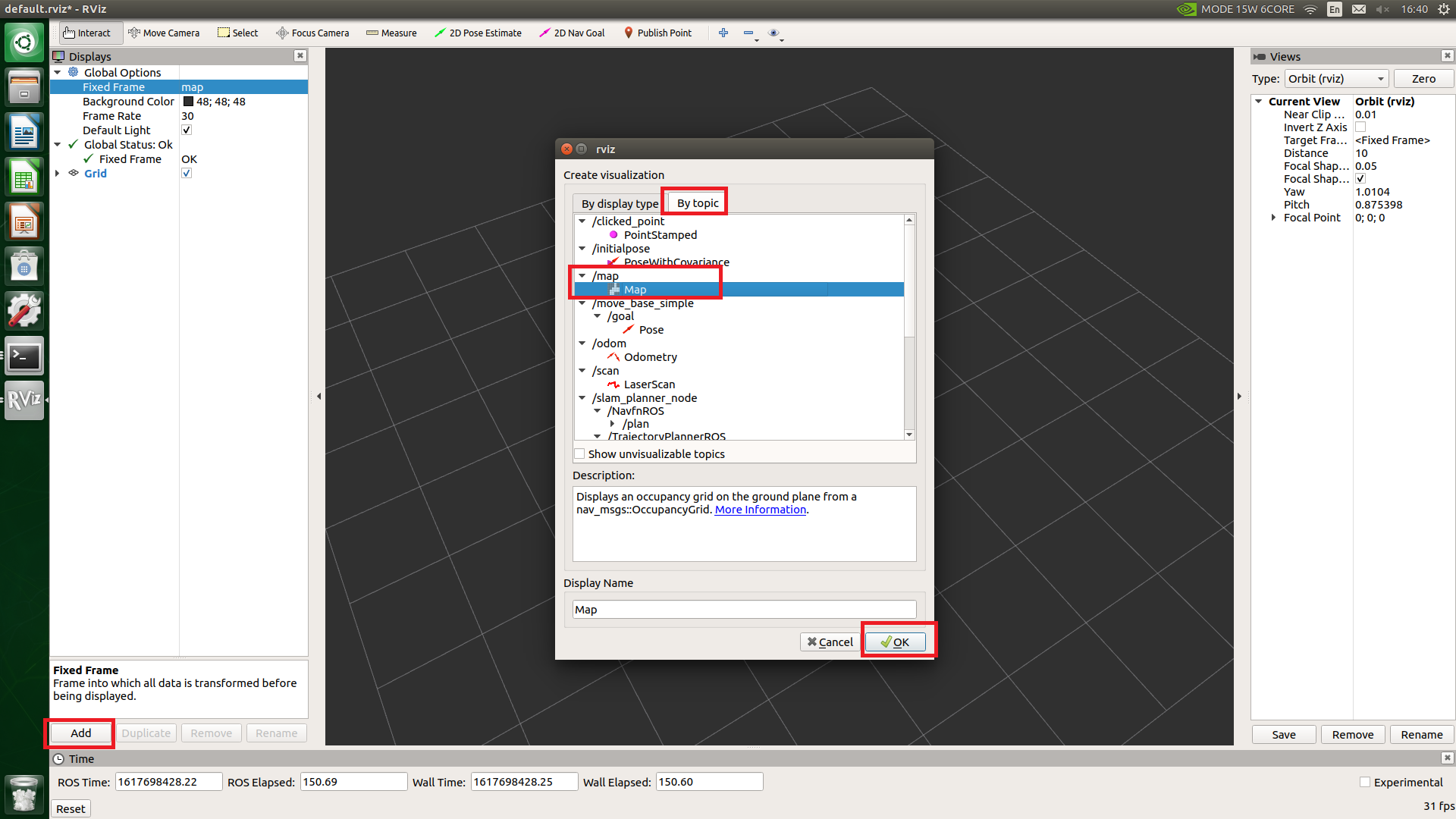
mapの追加
パスの追加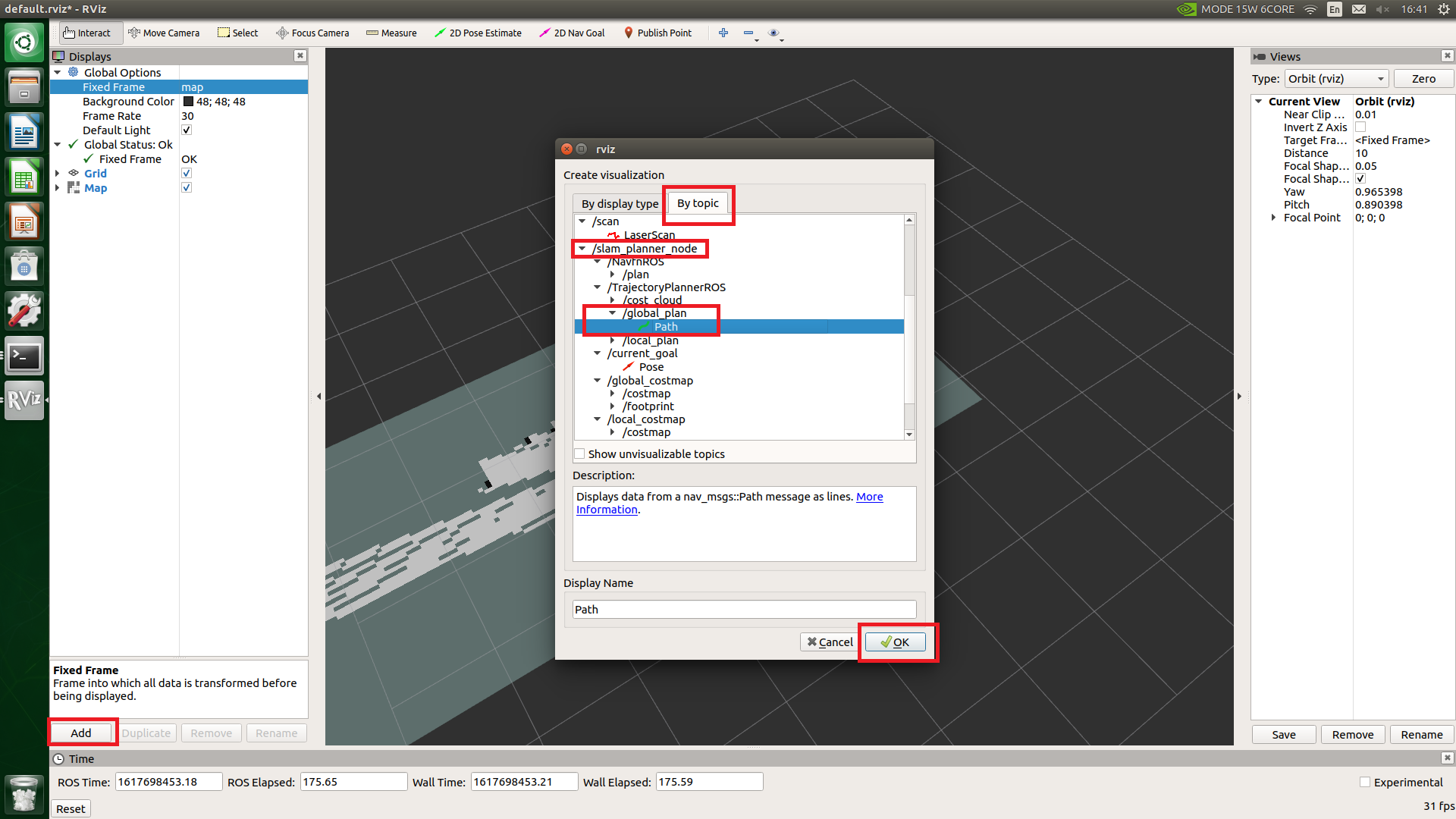
odometryの追加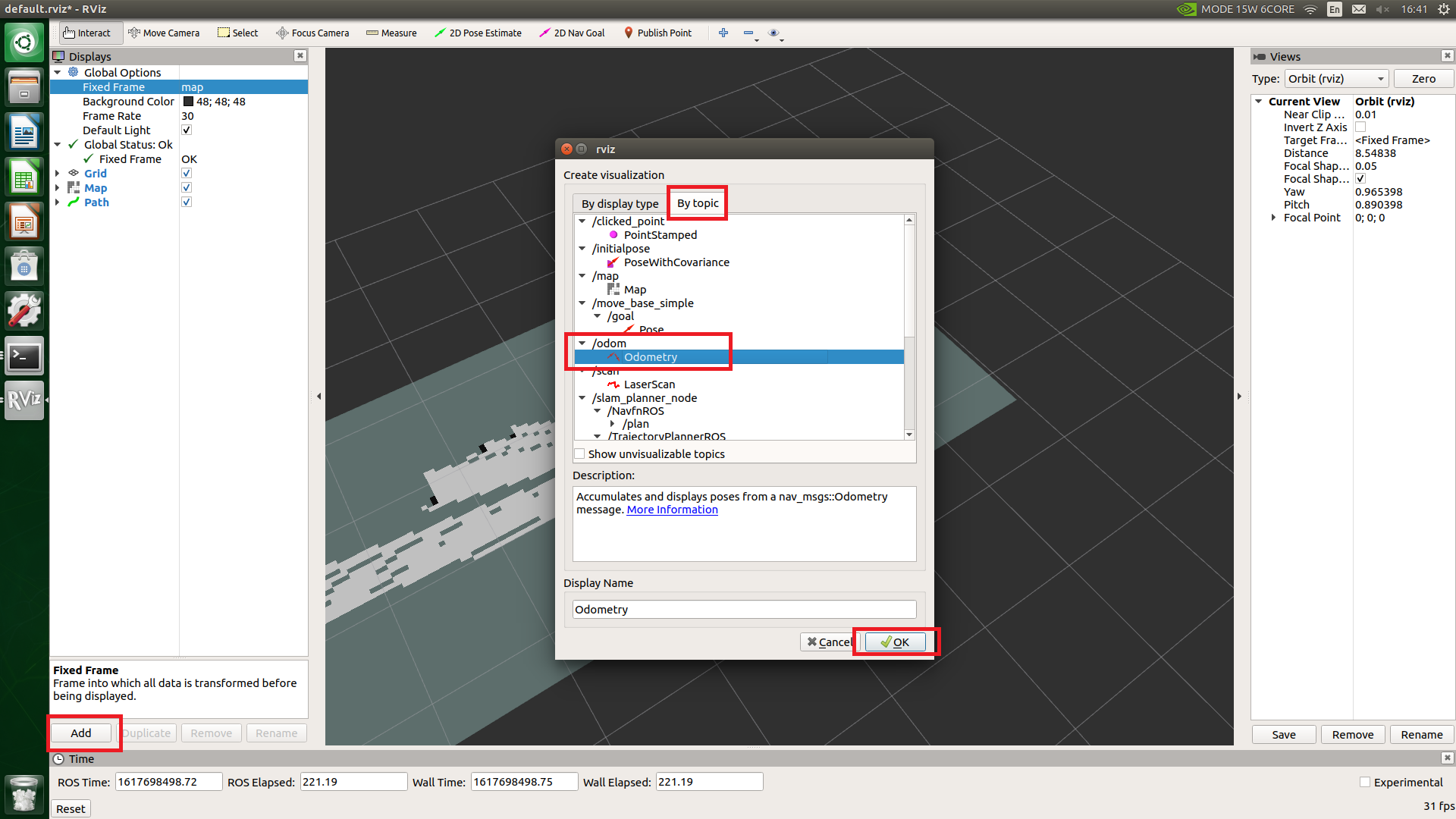
ゴールの指定