
このリレーボードを使用すれば、Raspberry Piで 高電圧/高電流のデバイスを制御できるようになり、手軽にホームオートメーションが実現します。 “RPi Relay Board WS-11638” の続きを読む
投稿者: T. Watari
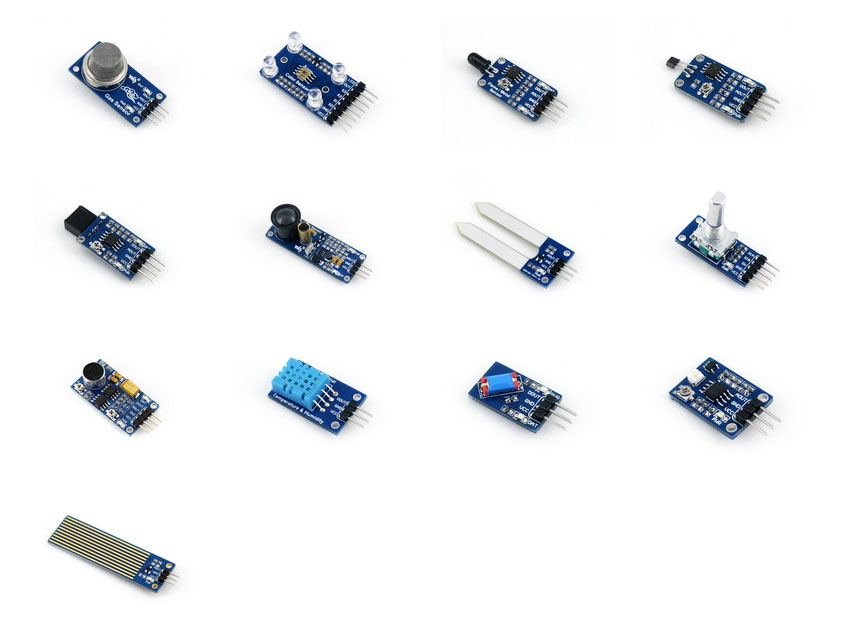
Sensors Pack WS-9467
Raspberry Pi High-Precision AD/DA Expansion Board WS-11010

4 Port USB HUB HAT for Raspberry Pi ws-12694

■概要
本製品は、Raspberry Piに多くのUSB機能を提供する4ポートUSBハブです。 “4 Port USB HUB HAT for Raspberry Pi ws-12694” の続きを読む
264×176, 2.7in E-ink display HAT, three-color
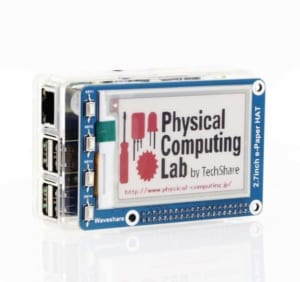
基本的な操作方法は2.13inch 電子ペーパーHATと同じとなります。 “264×176, 2.7in E-ink display HAT, three-color” の続きを読む
LattePandaの日本語化の手順
日本語化は、英語版Windows10に日本語を追加する事により可能です。 “LattePandaの日本語化の手順” の続きを読む
7インチ タッチディスプレイのご使用に関して
7インチ タッチディスプレイで下記対象製品のサポートデバイス、及びOSは以下の通りとなります。
LattePandaをWi-Fiに繋げよう!
LattePandaをWi-Fiに接続する前に、アンテナを接続しましょう!
LattePandaの電源をいれよう!
LattePandaの電源をいれよう!
LattePandaの電源は、microUSBポート、もしくはCN2 Header Pinより入力します。 “LattePandaの電源をいれよう!” の続きを読む
LattePandaの電話認証による再Activation
LattePandaのActivationで次のエラーが発生しActivationに失敗した場合、次の電話による認証をお試しください。 “LattePandaの電話認証による再Activation” の続きを読む
LattePanda Licenseキー入力方法
Physical Computing LabのLattePandaをご購入頂いた場合には、下図のLicenseカードが同梱されています。この番号を使用し製品のライセンスをアクティベーションする方法を説明します。 “LattePanda Licenseキー入力方法” の続きを読む
チュートリアルの内容=BBB電子工作エントリーキット=
本ページでは、BeagleBone Black 電子工作エントリーキットをお買い上げ頂いたお客様向けに、
ご利用方法のサンプルとして、チュートリアルを掲載させて頂いております。 “チュートリアルの内容=BBB電子工作エントリーキット=” の続きを読む
BeagleBone Black - セットアップ -
BeagleBone Black - セットアップ - “BeagleBone Black - セットアップ -” の続きを読む
BeagleBone Black – ネットワークにつなげる –
BeagleBone Black – ネットワークにつなげる –
BeagleBone Black – Android を起動させる –
BeagleBone Black は, 推奨OS である Angstrom のほかに Ubuntu や Android OS に対応しています. “BeagleBone Black – Android を起動させる –” の続きを読む
1.3 BeagleBone Blackの電源のオフ
1.3 BeagleBone Blackの電源のオフ
1.2「Cloud9-IDE」を動かす
1.2「Cloud9-IDE」を動かす
(1) ブラウザで「http://192.168.2:3000」を開いて下さい。 “1.2「Cloud9-IDE」を動かす” の続きを読む
2.2 スイッチでLチカ
2.2 スイッチでLチカ
SWを使って、Lチカをしてみよう。押すと、点灯。放すと,消灯。という回路を作ります。 “2.2 スイッチでLチカ” の続きを読む
2.1 Lチカ
2.1 Lチカ
Lチカの回路を作り、電気が流れるか確認してみましょう。 “2.1 Lチカ” の続きを読む
1.1 ドライバをインストールしてみよう!
1.1 ドライバをインストールしてみよう!
まず最初に、BBBをパソコンに接続します。 “1.1 ドライバをインストールしてみよう!” の続きを読む
MATLABへのArduino環境の導入に関して=Arduino と MATLAB で制御系設計をはじめよう!=
MATLABへのArduino環境の導入に関して
MATLAB/SimulinkからArduinoを簡単に操作するための環境がMATHWORKS社
より提供されている。 “MATLABへのArduino環境の導入に関して=Arduino と MATLAB で制御系設計をはじめよう!=” の続きを読む