
Raspberrypi On ZumoをPCなどのVNC画面からリモコンで操作します。取り付けた超音波センサーにより、障害物があると停止するようにします。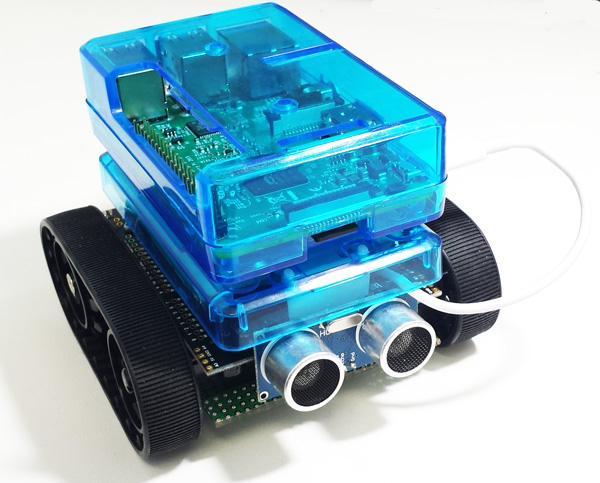
- 超音波モジュールの製作
- Arduino Leonardoのプログラム
- RaspberryPi のリモコンプログラム
“Raspberrypi On Zumo Python TkInterによる操縦・超音波センサによる停止” の続きを読む
Raspberrypi On ZumoをPCなどのVNC画面からリモコンで操作します。取り付けた超音波センサーにより、障害物があると停止するようにします。
“Raspberrypi On Zumo Python TkInterによる操縦・超音波センサによる停止” の続きを読む
スマホやパソコンのブラウザから構内のWi-Fiステーション経由でRaspberryPiOnZumoを
操縦するシステムを構築します。WebサーバーにはWebIOPiを使用します。
コードを入手する→codes “RaspberryPi On ZumoのWi-Fiコントロールシステム(WebIOPI)構築の手引き” の続きを読む
RaspiOnZumo 組立てマニュアル (20170822)