
カテゴリー: Arduino
Raspberrypi On Zumo Python TkInterによる操縦・超音波センサによる停止
Raspberrypi On ZumoをPCなどのVNC画面からリモコンで操作します。取り付けた超音波センサーにより、障害物があると停止するようにします。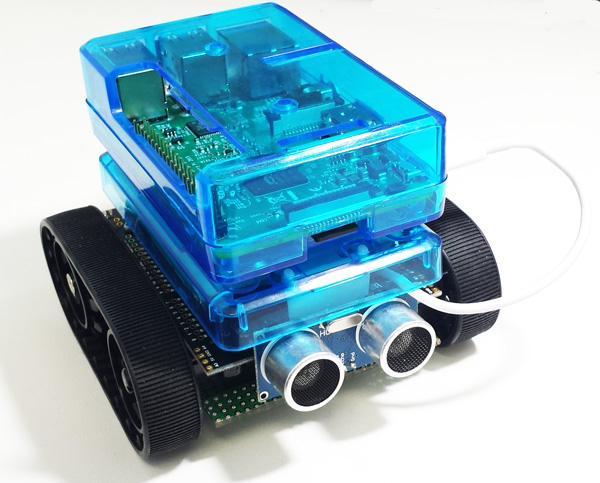
- 超音波モジュールの製作
- Arduino Leonardoのプログラム
- RaspberryPi のリモコンプログラム
“Raspberrypi On Zumo Python TkInterによる操縦・超音波センサによる停止” の続きを読む
RaspberryPi On ZumoのWi-Fiコントロールシステム(WebIOPI)構築の手引き
RaspberryPiOnZumoのWi-Fiコントロール(WebIOPi)システム構築の手引き
スマホやパソコンのブラウザから構内のWi-Fiステーション経由でRaspberryPiOnZumoを
操縦するシステムを構築します。WebサーバーにはWebIOPiを使用します。
コードを入手する→codes “RaspberryPi On ZumoのWi-Fiコントロールシステム(WebIOPI)構築の手引き” の続きを読む
MATLABへのArduino環境の導入に関して=Arduino と MATLAB で制御系設計をはじめよう!=
MATLABへのArduino環境の導入に関して
MATLAB/SimulinkからArduinoを簡単に操作するための環境がMATHWORKS社
より提供されている。 “MATLABへのArduino環境の導入に関して=Arduino と MATLAB で制御系設計をはじめよう!=” の続きを読む
Arduinoのブートローダの修復方法
ArduinoがPCに認識されない!
Arduino LeonardoをUSBケーブルでPCにつなげたとき、COMポートとして認識された後、すぐに「不明なデバイス」となってしまう場合には、次の可能性が考えられます。
(1) ハードウェア的な問題が発生している[…]
ArduinoがPCに認識されない!
Arduino LeonardoをUSBケーブルでPCにつなげたとき、COMポートとして認識された後、すぐに「不明なデバイス」となってしまう場合には、次の可能性が考えられます。 “Arduinoのブートローダの修復方法” の続きを読む