
DOBOT M1 のデジタル入力は,Dobot-M1-User-Guide-V1.5.3の4.3.2.2 Base I/O Interface によるとNPNとなっているようです。
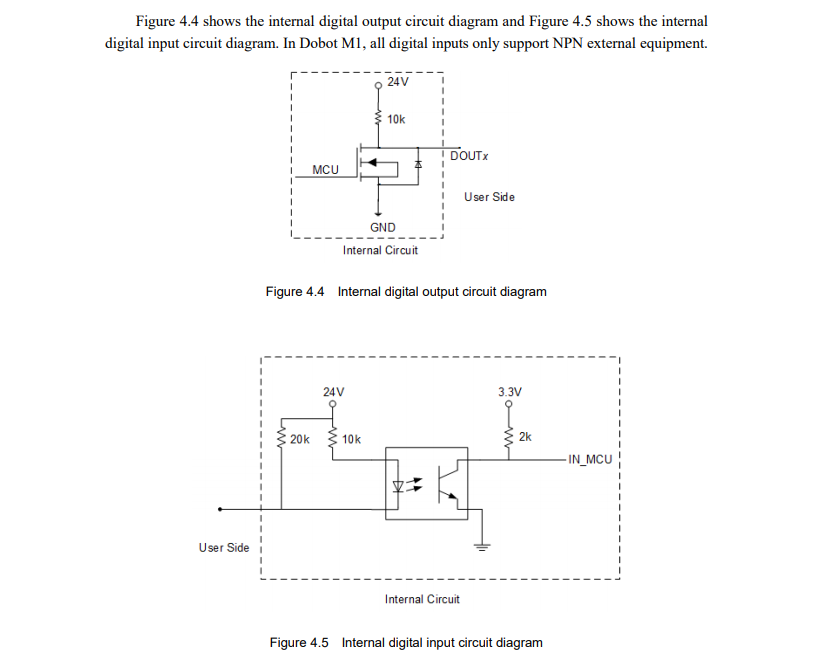
DOBOT M1 のデジタル入力は,Dobot-M1-User-Guide-V1.5.3の4.3.2.2 Base I/O Interface によるとNPNとなっているようです。
メインボード交換後はZ軸のジョイントの値などでエラーが発生しますが、Homeコマンドを実行すると正常に使用可能となります。
Homeコマンドは Tools > Homeから可能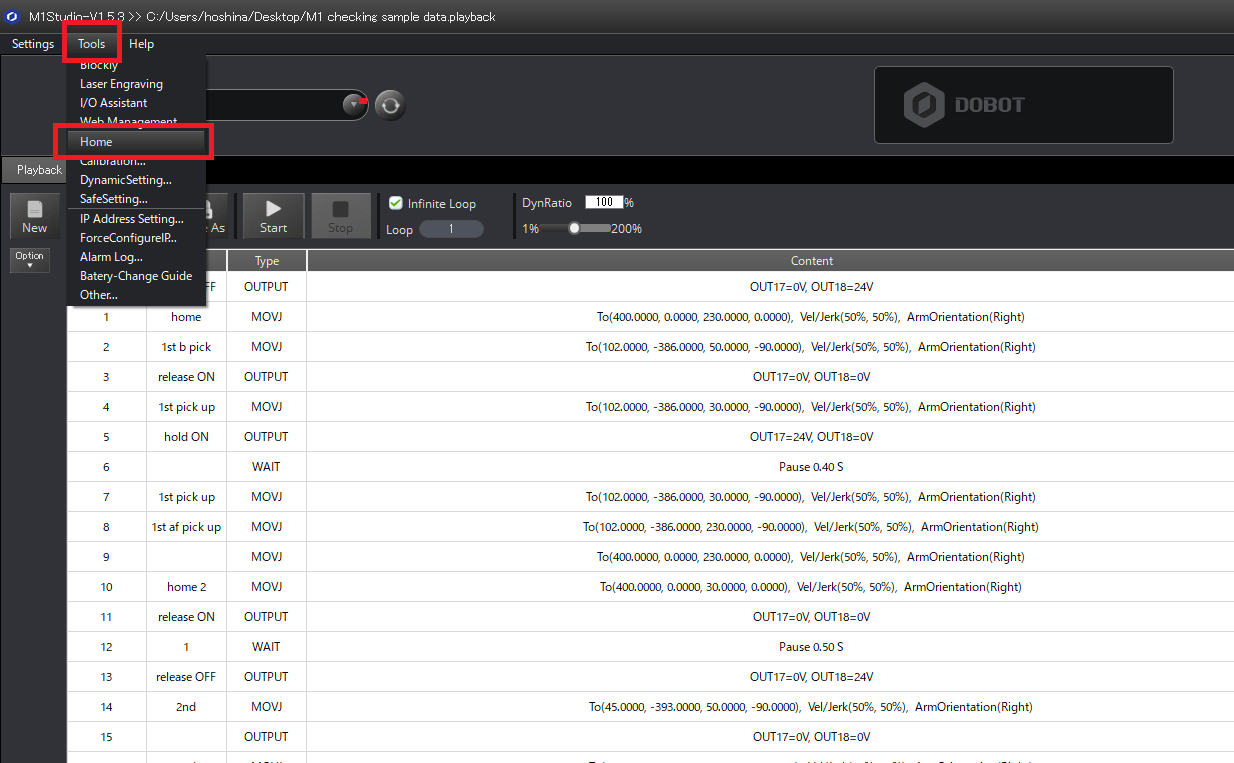
本記事では,DOBOT社から発売されております6軸ロボットアーム CR5をご紹介いたします.また,作業を行うための3rdパーティ製のエンドエフェクタを使用するための方法についてもご説明いたします.
本項目では、DobotStudioのBlocklyから自動生成したPythonコードをRaspberry Piで実行するための手順を記載しています。
“DobotStudioのBlocklyから自動生成したPythonコードをRaspberry Piで実行する方法” の続きを読む
DOBOT M1 の故障により,PCと接続ができない状況でM1の箱に入れるためにZ軸を下す方法を記載します。
本項目では、Dobot Magician LiteのMagicBoxのファームウェア更新方法を記載しています。
現在、出荷時の状態のDobot Magician Liteにおいて、以下の問題が報告されています。
・Dobot Magician LiteをDobotStudioに接続時に、Magic Boxのファームウェアの更新が求められる。
・手順に従ってファームウェアの更新を行うと、終了せずにビープ音が鳴り続ける。
本項目では、対処方法を記載しています。
“Dobot Magician Lite ― MagicBoxのファームウェア更新が終了しない問題について” の続きを読む
MG400のUDPで外部機器と通信する方法
MG400のRemote I/O モードでプログラム終了後に再度startさせようとしたときに再開されませんでした。その対策を記載します。
Unitree A1 Lidar オプション ~ Jetson NX 内部でSLAMを起動する方法 ~
“Unitree A1 Lidar オプション ~ Jetson NX 内部でSLAMを起動する方法 ~” の続きを読む
DOBOT Magician エアーポンプ部分の規格を計測結果をもとにまとめました。
CRシリーズ操作用アプリ”SCStudio”にはユーザーというものがあり,ユーザーによって使える機能に制限があります。
今回、そのユーザーの変更方法を記載します。
CRシリーズのエラーと対策をまとめます。
Dobotstudio2020 のscript(Lua)を用いた操作方法を記載します。
Unitree A1 Lidar オプションで自律移動をするときに速度命令がどのように流れているのかまとめました。
お問い合わせ内容
Dobot Magician で dobot を p1(x:180,y:0)からp2(x:180,y:10)へ移動させたとき
p1~p2間の距離が≒13mmになっています
Dobot Magician で dobot を p1(x:180,y:0)からp2(x:180,y:10)へ移動させたとき
p1~p2間の距離が≒13mmになっています
DOBOT Robot Vision Kit内で標準で用意されているサンプルscript functionを元に、Shell Moduleの使用方法を記載します。
本記事ではUnitree A1 (Lidarオプション)でアプリケーションからSLAMを実行したときに内部のCPUでどのようなプログラムが実行されているのか確認していきたいと思います。
CR5のAndoroidタブレットから操作する方法の説明を記載します。
本記事は下記URLのDobot CRStudio APP User Guide v3.7.0.9をもとに作成しています。
Dobot MagicianのEIOに関するドキュメント”Dobot Magician Interface description v2″(ダウンロードサイト)には入力モードの等価回路は乗っているのですが,出力モード時の等価回路が乗っていません。
そこで今回Dobot Magician のEIO14の出力モードの時の内部回路の等価回路を実験により求めました。
MG400の衝突検知の設定方法
Robot Vision KitはDOBOT MagicianやDOBOT M1でビジョンシステムを素早く作成することができます。今回はその中でもよく使われる円検出について解説します。



