DobotMagicianの上位機種のMG400で,I/Oからプログラムを実行する方法を説明します。
Remote I/Oのプログラム作成についての注意点はこちら
DobotMagicianの上位機種のMG400で,I/Oからプログラムを実行する方法を説明します。
Remote I/Oのプログラム作成についての注意点はこちら
Dobot M1に問題が生じた際に、メーカーに問い合わせをする場合にはシリアル番号とA9のバージョンが必要となることがあります。今回はその2点を確認する方法をまとめさせて頂きます。
USB Serial接続に加えてDOBOT M1はネットワーク接続でPCから操作することができます。その場合にはファームウェアアップデートやオフライン実行の機能が使用できるようになりとても便利です。しかしUSB Serial接続に比べネットワーク接続をする場合には、少し設定が必要で躓くポイントも多いため、そのため本記事でDobot M1とPCをネットワーク接続するまでの流れをまとめさせて頂きました。 “DOBOT M1のネットワーク接続の方法” の続きを読む
TinkerOS V2.0.8にてISPの構造が変更されたことで、カメラの取扱いについて以前までのバージョンと若干異なる対応が必要となります。本稿では、現行の最新バージョン(V2.1.16)で確認したカメラの接続と設定、および使用方法を解説いたします。
Unitree A1にはExplorerバージョンがあり、Lidarが搭載されています。通常版のUnitree A1にも、Lidarをオプションで用意しています。
いずれの場合も、LidarをA1に接続するケーブルは、破損を防ぐため外した状態で、専用ケースに格納されています。
Lidarを使用するにあたって、ケーブルを接続すべき場所および補足情報をまとめます。
Tinker Boardは、ARMベースのシングルボードコンピュータです。先日、ASUS社から新たにTinker Board 2/2Sの情報が公開されました。IoTデバイスへの活用に向けた、さまざまな改良がなされているようです。(以下の画像はTinker Board 2Sです)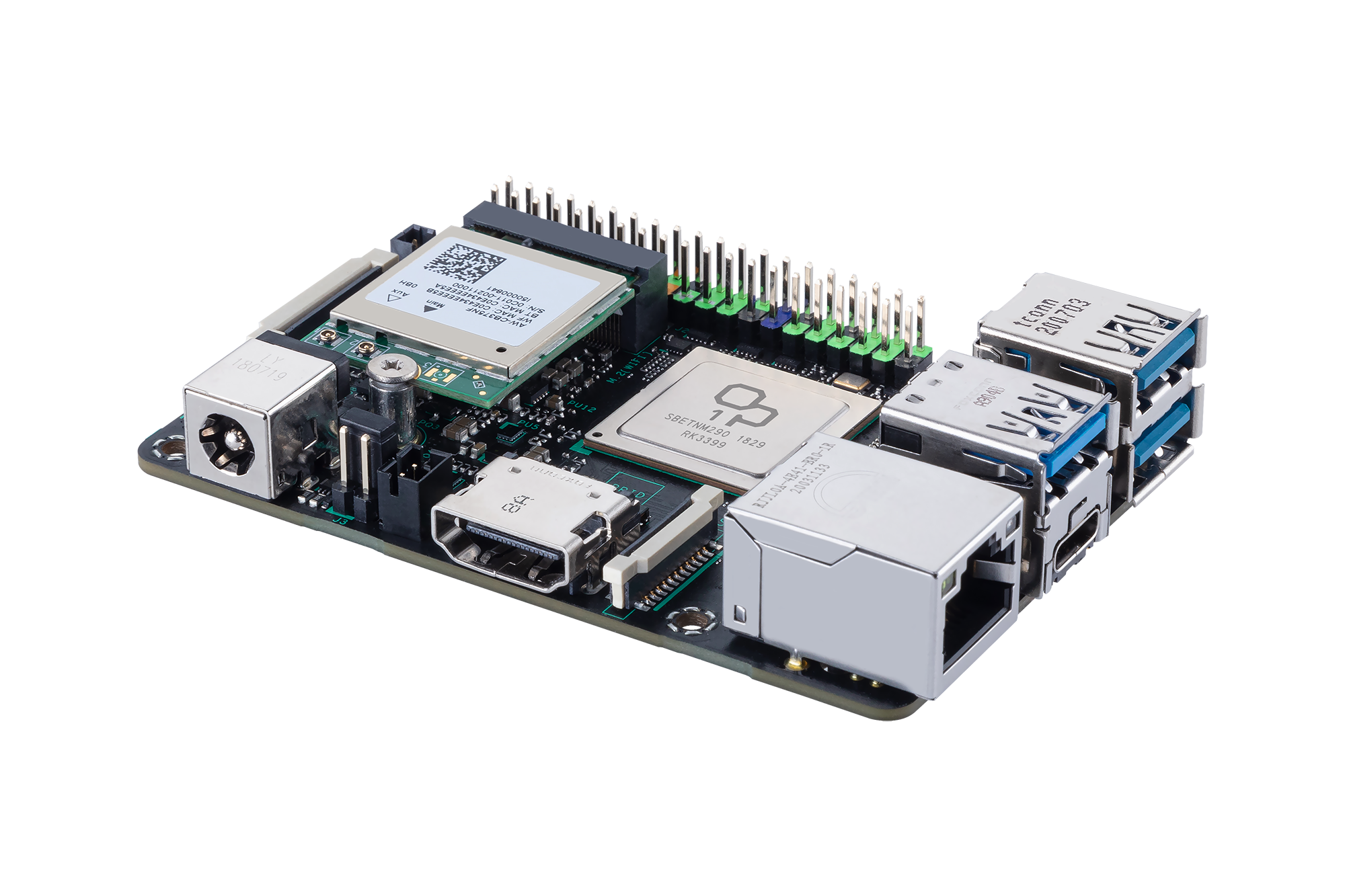

本稿では従来のTinker Boardとスペックを比較しつつ、Tinker Board 2/2Sで注目すべき点を取り上げます。
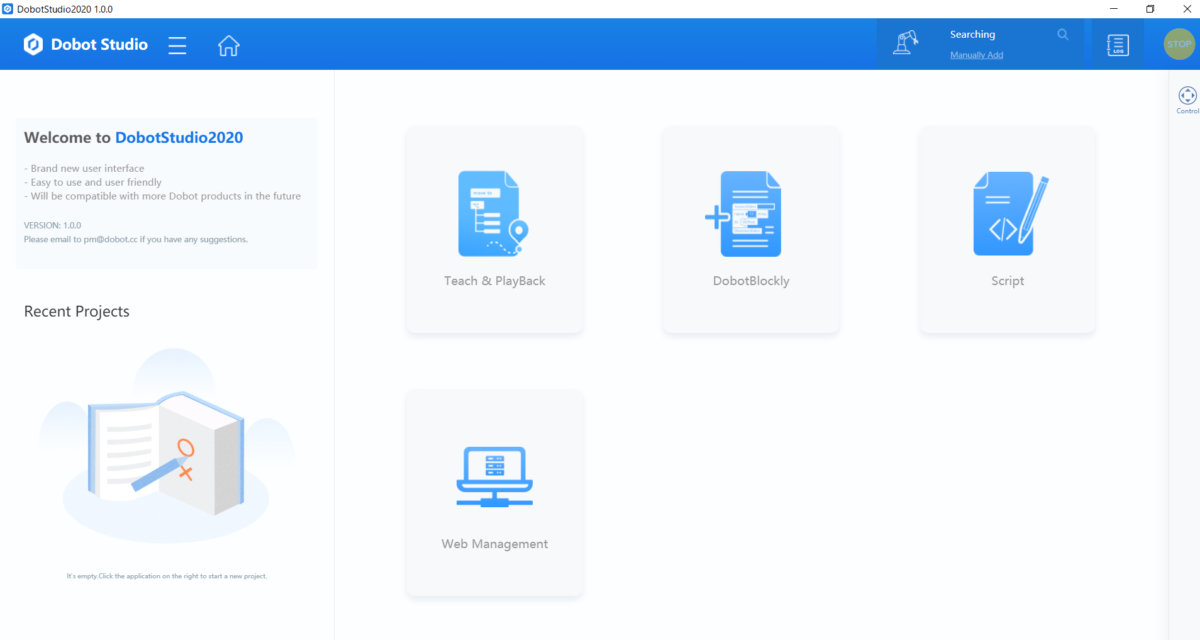
2020年9月、Dobotの操作を手軽に行えるソフトウェアの新バージョン、
DobotStudio2020(v1.0.0)
がリリースされました。(v1.0.0ではDobot M1のみ対応)
本稿より数回に分け、従来のM1Studioから大きく変化した点を見ながら、DobotStudio2020の紹介を行います。本稿では主な機能を利用するための玄関口となる「画面構成」に焦点を当て、簡単にご紹介いたします。
興味がございましたら、ぜひダウンロードセンター
https://www.dobot.cc/downloadcenter/dobotstudio2020.html#most-download
より入手した上でご体験ください。
本稿ではBlocklyによるプログラミングで扱うことになるDobotAPI関連のブロックについて、関数の役割やパラメータの意味を説明いたします。
以下blockly中での分類ごとに、順に説明いたします。パラメータを入力する部分は
関数名 {パラメータ}
のように波かっこで囲っています。また、生成コード中でパラメータにより変化する部分は斜体(イタリック)で表します。
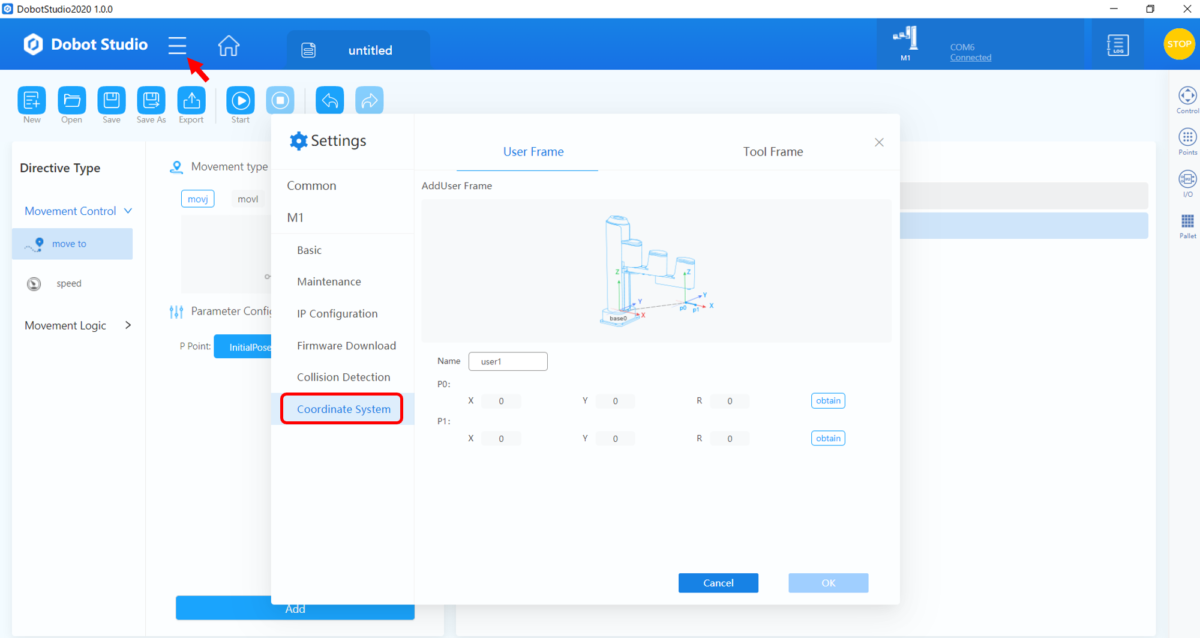
こちらは2020年9月にリリースされた、DobotStudio2020の紹介記事です。本稿では新機能となるユーザー座標系(User coordinate system)およびツール座標系(Tool coordinate system)の概要をご紹介いたします。
興味がございましたら、ぜひダウンロードセンター
https://www.dobot.cc/downloadcenter/dobotstudio2020.html#most-download
より入手した上でご体験ください。
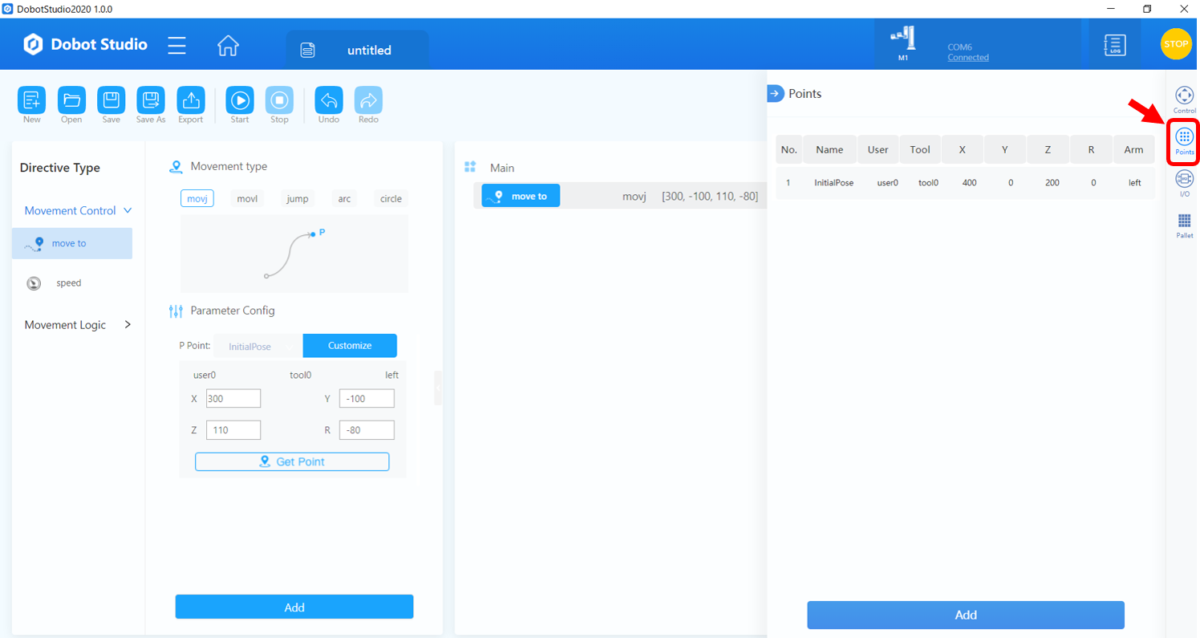
こちらは2020年9月にリリースされた、DobotStudio2020の紹介記事です。本稿では新機能となるポイントリスト(Points List)の概要をご紹介いたします。
興味がございましたら、ぜひダウンロードセンター
https://www.dobot.cc/downloadcenter/dobotstudio2020.html#most-download
より入手した上でご体験ください。
こちらは2020年9月にリリースされた、DobotStudio2020の紹介記事です。本稿ではより便利になったパレット(pallet)機能の概要をご紹介いたします。
興味がございましたら、ぜひダウンロードセンター
https://www.dobot.cc/downloadcenter/dobotstudio2020.html#most-download
より入手した上でご体験ください。
こちらは2020年9月にリリースされた、DobotStudio2020の紹介記事です。本稿では新機能となる入出力エイリアス(I/O alias)機能の概要をご紹介いたします。
興味がございましたら、ぜひダウンロードセンター
https://www.dobot.cc/downloadcenter/dobotstudio2020.html#most-download
より入手した上でご体験ください。
DobotStudioは複数の言語表示に対応しており、日本語設定に切り替えることも可能です。しかしながら、ソフトウェア内での日本語表記には翻訳の関係で不自然な表現になっている箇所が見受けられ、元の(英語の)関数名が判断しづらいものも多数含まれています。
本稿では日本語設定をお使いの方がBlocklyを扱う際参考にできる、英語ブロック名との対応を一覧にまとめております。
現在適用しているDobot Magicianのファームウェアのバージョンを、DobotStudioを用いて確認する方法について説明します。
Dobot MagicianのI/Oインターフェースを利用して、2つのエアーポンプを同時に動作させる方法の解説を行います。より広範な作業への適用をお考えの方にとって、ご参考になれば幸いです。
Dobot Magicianに関するFAQです。
お問い合わせ内容:
SetPTPCmd等で指定した同じ位置に対して、時折アームが少しずれた位置(~10mm)に移動することがある。
アーム動作にずれが生じる場合には、原因となるいくつかの可能性が考えられます。お困りの方は以下の点を参考に、いま一度お手元にてご確認いただけますと幸いです。
キャタピラユニットCuGoを利用したAGVシステムについての解説を行います。
本システムはArduinoとPixy2を用いてCuGoの制御を行っています。
実際に走行している動画がYouTubeにアップロードされておりますので、そちらも併せてご覧いただければと思います。
Dobot M1のバッテリーに関する概要を記載しています。末尾には交換手順が記載されたユーザーマニュアルへのリンクがございますので、必要に応じてご参照いただければと思います。 “[Dobot M1] バッテリーについて” の続きを読む
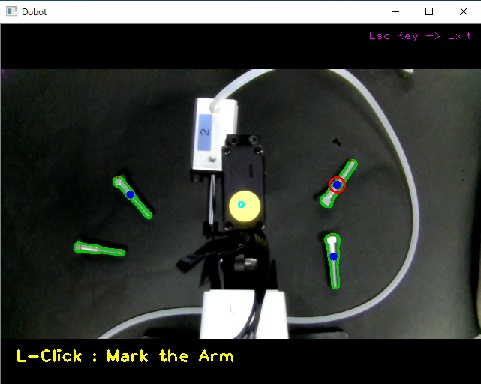
DoVision1 購入者向けのサンプルプログラムです。
今回は物体検出の一例として、特徴点マッチングを用いたボルトの検出とピックアップ動作を行います。内容の詳細に関しては同封の解説書をご参照ください。 “DoVision1 物体検出サンプルプログラム” の続きを読む
Seeed StudioのOdysseyは、Intel Celeron J4105搭載のmini PC です。
Activate済みのWindows10 Enterpriseがインストールされたモデルは、購入後すぐに使用できる手軽さがありますが、デフォルトの表示言語は英語です。
Windows10を扱い慣れている方でも、英語版OSを日本語化する機会はそうそうないので戸惑うはず。そこで、手順をまとめてみました。
DOBOTのサンプルプログラムのPython,C#,JAVAはDLLというものを参照しています。このDLLはC++で記述されているライブラリです。自分のOSにあったDLLがない場合は自分でコンパイルして作成することができます。今回はRaspberry Pi 3B+でDLLを作成し、それを使用してPythonでDOBOT M1を動作させる方法を記載します。動作している様子はこちら “Raspberry PiでDOBOT M1を動作させよう!” の続きを読む
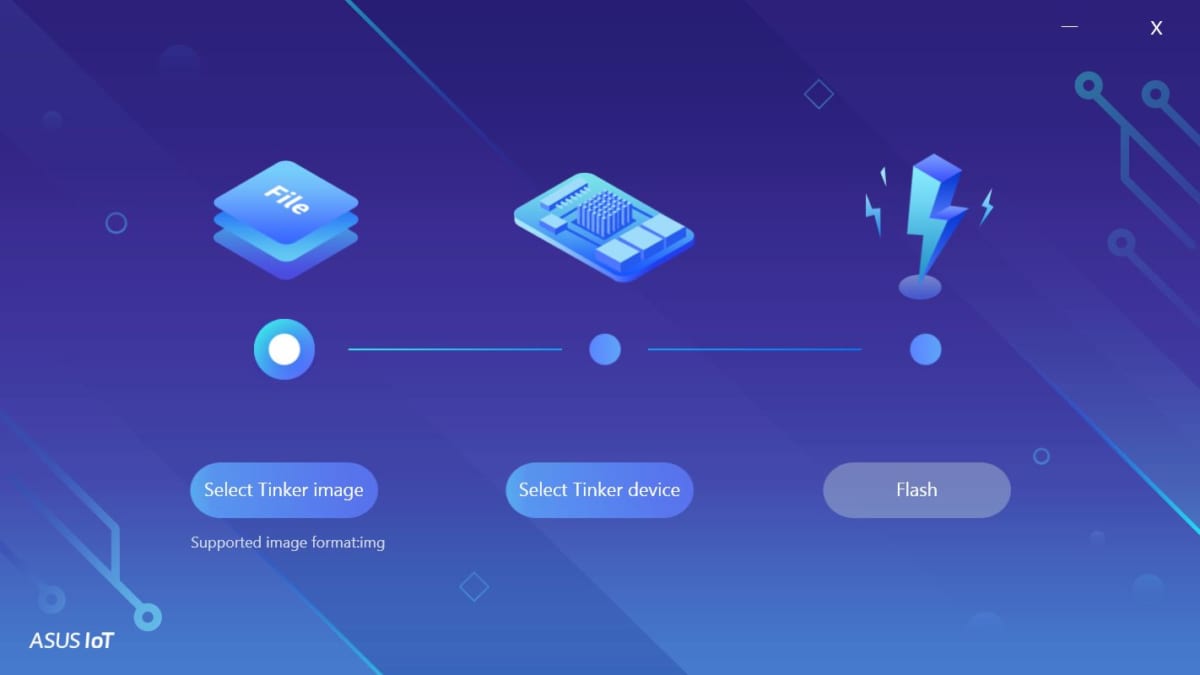
Tinker Edge Rは、16GbyteのeMMCを内蔵しています。
本稿では、このeMMCに、Tinker Edge R Debian OSをインストールする手順について説明します。
Dobotで軌道に沿う動作を行う場合、軌道に沿うような複数の座標点を与えます。その際SetPTPCmdを使用すると、1つ1つの点で停止してしまい、滑らかな動作をしません。ここでSetCPCmdを使用します。このコマンドは、3Dプリントやレーザー彫刻の際に使われているコマンドで、複数の座標点を与えたときに連続的な動作を行うことができます。今回は円軌道に沿う動作を行うプログラム例に、軌道に沿う動作を行う方法を解説します。Dobot StudioのScripts環境で行った場合とC++11環境で行った場合の2種類の例を示します。
Dobot Magicianに保存されたプログラムをスタンドアロンで動作させるには背面にあるKEYボタンを押すことで起動することができました。しかしプログラムの停止や初期化などの機能がなかったので使用する際に不便でした。そこで新たに追加されたAdvanced I/O Functionを使用します。この機能を使用するとDobot Magicianに接続した外部スイッチからプログラムを再開や停止などを行うことや外付けしたLEDによるエラーの検出などを行うことができます。

![[Blockly] DobotAPIブロックのパラメータ解説](https://physical-computing-lab.net/wp-content/uploads/8e1b831cc1b2fb946e6037bc92c623dc.png)
![[Blockly] 各ブロックの英語-日本語表記対応](https://physical-computing-lab.net/wp-content/uploads/blockly.png)

![[Dobot M1] バッテリーについて](https://physical-computing-lab.net/wp-content/uploads/DobotM1_phys.jpg)