![[Blockly] DobotAPIブロックのパラメータ解説](https://physical-computing-lab.net/wp-content/uploads/8e1b831cc1b2fb946e6037bc92c623dc.png)
本稿ではBlocklyによるプログラミングで扱うことになるDobotAPI関連のブロックについて、関数の役割やパラメータの意味を説明いたします。
DobotAPIブロックの説明
以下blockly中での分類ごとに、順に説明いたします。パラメータを入力する部分は
関数名 {パラメータ}
のように波かっこで囲っています。また、生成コード中でパラメータにより変化する部分は斜体(イタリック)で表します。
FAQのコーナーです。
本稿ではBlocklyによるプログラミングで扱うことになるDobotAPI関連のブロックについて、関数の役割やパラメータの意味を説明いたします。
以下blockly中での分類ごとに、順に説明いたします。パラメータを入力する部分は
関数名 {パラメータ}
のように波かっこで囲っています。また、生成コード中でパラメータにより変化する部分は斜体(イタリック)で表します。
DobotStudioは複数の言語表示に対応しており、日本語設定に切り替えることも可能です。しかしながら、ソフトウェア内での日本語表記には翻訳の関係で不自然な表現になっている箇所が見受けられ、元の(英語の)関数名が判断しづらいものも多数含まれています。
本稿では日本語設定をお使いの方がBlocklyを扱う際参考にできる、英語ブロック名との対応を一覧にまとめております。
現在適用しているDobot Magicianのファームウェアのバージョンを、DobotStudioを用いて確認する方法について説明します。
詳細に評価はしていませんが、GRBL-Panelを利用できたという報告を受けております。 “MoozStudio以外でMOOZ-2ZをCNCフライスとして使えるソフトウェアはありますか?” の続きを読む
■概要
本製品は、Raspberry Piに多くのUSB機能を提供する4ポートUSBハブです。 “4 Port USB HUB HAT for Raspberry Pi ws-12694” の続きを読む
基本的な操作方法は2.13inch 電子ペーパーHATと同じとなります。 “264×176, 2.7in E-ink display HAT, three-color” の続きを読む
Raspbian OSのGUIメニューには、SDカードのコピー機能があり、サイズの違うSDカードにも対応しているため、通常はこの機能を使うのが便利です。 “Raspberry Pi の micro SDをまるごとバックアップする方法” の続きを読む
以下をご確認下さい。 “コンベアキット付属のカラーセンサーが1色しか認識しない。” の続きを読む
DobotoMagicianのLEDをご確認下さい。
緑色に点灯していない場合は、アームが動こうとしている座標位置が可動範囲の外に設定されている可能性があります。座標パラメータを可動範囲内に設定しなおして再度実行してみて下さい。
DobotStudioのHomeボタンをクリックして、ホームポジションに戻してから、再度実行してみて下さい。Home後に、Beep音がなり、LEDが緑に点灯していることを確認して下さい。
クラッシュ直後のダイアログウィンドウの詳細ボタンをクリックして下さい。メッセージに中にig4icd23.dllに関する記述がある場合、このdllファイルが壊れている可能性があります。
以下の手順をお試し下さい。以下のサイトなどから、ig4icd32.dllをダウンロードします。 “DobotStudioが起動後すぐにクラッシュする。” の続きを読む
Raspberrypi On ZumoをPCなどのVNC画面からリモコンで操作します。取り付けた超音波センサーにより、障害物があると停止するようにします。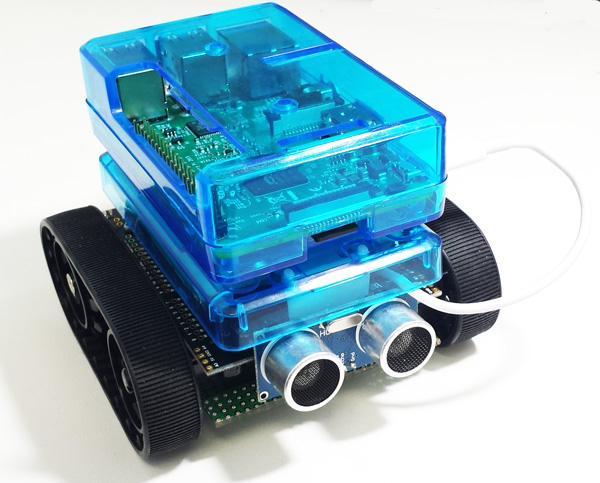
“Raspberrypi On Zumo Python TkInterによる操縦・超音波センサによる停止” の続きを読む
$ sudo apt-get update
$ sudo apt-get install ibus-anthy “RaspberryPi日本語入力 iBus-anthy を入れる” の続きを読む
いくつかの原因が考えられます。 “DobotMagicianのR(J4)が回転しない。” の続きを読む
LXTerminalから次のコマンドでインストールします。 “TinkerBoardでRemoteDesktop(VNC)を使う” の続きを読む
lxterminalで次のようにタイプして、Raspiの現在のネットワークの状態を確認します。 “Raspberry PI 3 の無線LANに固定IPアドレスを設定する” の続きを読む
RaspberryPiデスクトップ上で メニュー>設定>Raspberry Piの設定 を選ぶ。
VNCを「有効」にします。 “RaspberryPiのVNC設定方法” の続きを読む
いくつかの原因が考えられます。以下の項目をご確認ください。 “吸引カップ(Suction Cup)の吸引力が弱い” の続きを読む
いくつかの可能性がありますので、以下を確認して下さい。 “DobotMagicianに接続できない。” の続きを読む
DobotStudioは以下のプラットフォームをサポートします。
Windows XP (Blockly機能はWindows XPではサポートされません), Windows7 SP1 x32/x64, Windows8 / Windows10, mac osx10.10, mac osx10.11, mac osx10.12
開発元のウェブページにある、ダウンロードセンターより無償でダウンロードできます。
![[Blockly] 各ブロックの英語-日本語表記対応](https://physical-computing-lab.net/wp-content/uploads/blockly.png)