
Go2のメーカー公式ドキュメントです。
Unitree GO1 Edu/Edu+のその他公式資料について
表示するにはパスワードが必要です。
Unitree GO1 Proの説明書のダウンロードについて
Unitree GO1 Edu/Edu+の説明書のダウンロードについて

Dobot MG400 ー MACアドレスの変更方法

MG400のMACアドレスは工場出荷時に全て同じ値に設定されております。複数台連携時には、IPアドレスだけでなく、MACアドレスも重複しないよう変更しておく必要があります。
本稿ではMG400のMACアドレスの変更方法を記載しています。
MG400 – I/Oの読み取りが意図したタイミングとずれてしまう場合の対処法
本稿ではMG400のI/Oの読み取りのタイミングが意図した場所とずれてしまう問題について、原因と対処法を案内しています。
MG400 – Remote I/Oモードの設定方法
MG400では、Remote I/Oモードに設定することでPCなしでスイッチなどのデジタルI/Oに接続した外部機器から事前に設定したプログラムの実行・停止などの制御を行うことができます。
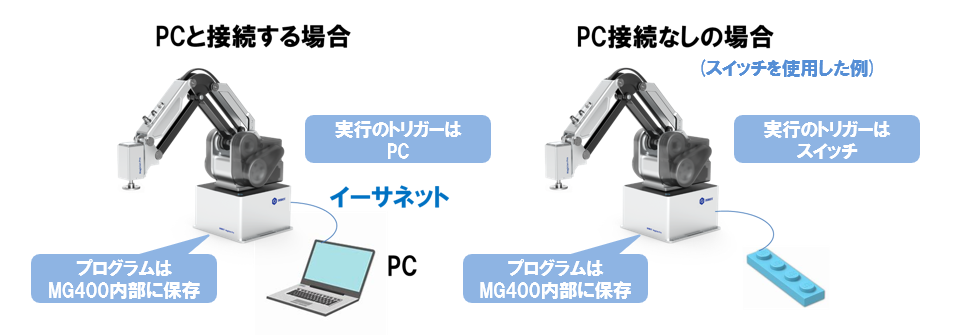
本稿では、Remote I/Oモードの設定方法をご紹介いたします。
Unitree A1/Aliengo の歩行モードを変更する方法
Unitree A1/Aliengo の歩行パラメータを調整する方法
DOBOT日本語フォーラム
日本語フォーラムへの参加はこちらから:
MG400 小型電磁グリッパキット ― インストール方法

本稿では、Dobot社が販売しているMG400純正オプションの小型電磁グリッパーのインストール方法について記載しています。
MG400 エアポンプキット ― インストール方法

本稿では、Dobot社が販売しているMG400純正オプションのエアーポンプのインストール方法について記載しています。
MG400 – 手先のモーターから振動と異音が発生する場合の対処法
MG400のアームに給電を行うと、手先部分のモーターから振動と異音が発生する場合があります。
本稿では、原因と対処法を記載しています。
Dobot MOOZ-2 PLUS – キャリブレーション方法
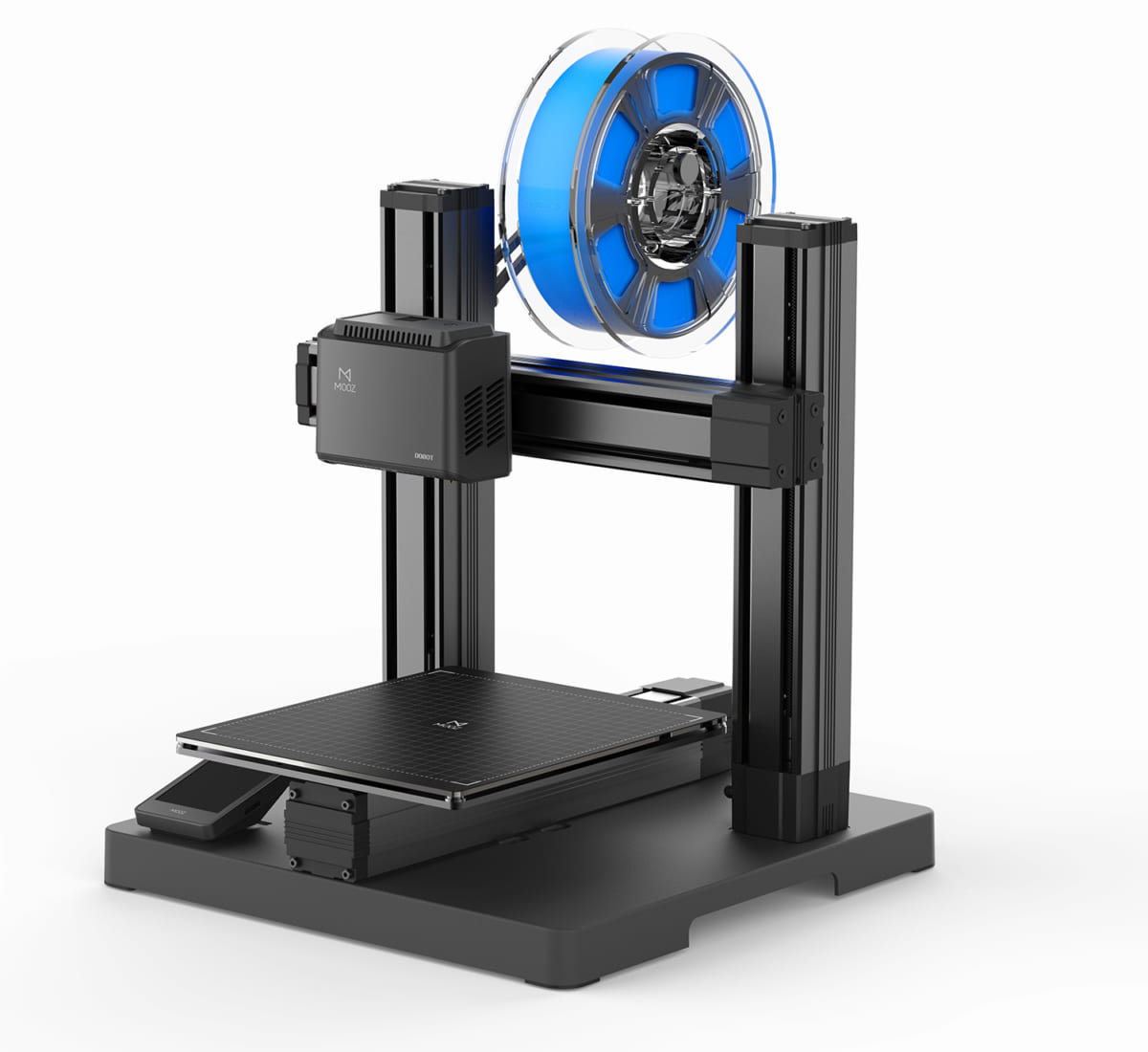
本稿では、3DプリンターDobot MOOZ-2 PLUSのキャリブレーション方法を記載しています。
MG400 ― プログラムのバックアップ方法
本稿では、DobotStudio2020またはSCStudioで作成したMG400のプログラムをバックアップする方法を記載しています。
Dobot Magician – キャリブレーション方法

Dobot Magicianは、力が加わることによってアームに歪みが生じ、測位精度が低下してしまう場合があります。この場合、キャリブレーションを行うことによって、アームのずれを校正することができます。
本稿では、Dobot Magicianのキャリブレーションが必要な状態やその方法について記載しています。
MG400 ― キャリブレーション方法
アームに強い衝撃を加えた場合など、MG400の原点位置がずれてしまった場合には、ホームキャリブレーションが必要となります。
本稿では、MG400に同封されているキャリブレーションツールの使用方法を記載します。
注意:通常のプログラムでホーム位置を変更したい場合には、ユーザー座標系(User Coordinate)を使用してください。
Dobot MG400 ― セットアップガイド
MG400は、制御ソフトウェアDobotStudio2020を使用することで、ティーチアンドプレイバック、Blockly、スクリプトによる制御を行うことができます。
本稿では、MG400の設置からDobotStudio2020に接続するまでの方法をご案内します。
Unitree A1用 高トルクインテリジェントモーターのご購入者様へ
Unitree A1/AlienGo の二次開発環境について

Unitree社のA1およびAlienGoの二次開発環境として、運動制御SDKおよびUnitree-ROSがgithubで公開されております。ご購入を検討中のお客様は是非ご参照ください。
なお、製品をご購入いただいたユーザ様には、限定情報として、ユーザマニュアルやSoftware development guideのダウンロード先とアクセス用のパスワードをお知らせしております。
Dobot MG400 ― スペックについて
本稿ではDOBOT MG400(Magician Pro)のスペックに関する事項を中心に、よくあるご質問と回答を記載しています。
産業用途を意識したモデルとして、従来のDOBOT Magicianと比べどのように進化しているのでしょうか。導入をご検討中の方は、こちらを参照いただければと思います。
Dobot M1 ― M1Studioの言語設定変更方法

Dobot M1対応制御ソフトウェアのM1Studioは中国語表示が初期設定となっております。
本項目では、M1Studioの中国語表示を英語表示に切り替える方法を説明します。なお、日本語表示には対応しておりませんので、ご了承ください。
Dobot CR Series ― ログデータの取得方法

CR Series(CR3, CR5, CR10)の不具合時に、ログをお手元に準備していただくことでスムーズにお問合せができます。
本項目では、CRStudioを用いたCR Seriesのログデータの取得方法を紹介します。
Dobot CR Series ― 操作方法
本項目では、Dobot CRシリーズの操作方法を解説している動画へのリンクをまとめています。
OnRobot Web Client ― ログイン、設定方法

OnRobot社製エンドエフェクターおよびそのコントロールを行うCompute Boxは、Web Clientを用いてグリッパーの開き幅等のコマンド設定を行うことができます。この方法では、別途アプリケーションをインストールする必要がなく、ブラウザ上で簡単に操作を行うことができます。
本項目では、RG2およびCompute BoxのCR5と連動した制御を例に、Web Clientの使い方を記載しています。